




1 引 言
相比于固定翼无人机,多旋翼无人机有不受起降场地限制、成本低廉、机动灵活等诸多优势。伴随着GNSS(Global Navigation Satellite System,GNSS)测量精度越来越高,信号接收设备轻量化、小型化和后差分技术的发展,已有专业测绘型多旋翼无人机应用于测绘生产项目,这类无人机主要来源为针对测绘需要研发或基于消费级无人机平台搭载精密GNSS定位设备、配备全画幅相机,而专业型无人机昂贵的价格让一般测绘单位望而却步。
本文结合某区1∶500测图任务,根据作业环境和设备情况,设计了消费级四旋翼无人机的航空摄影测量方案,并且布设足够的控制点提高绝对定向精度,保证数字产品精度的可靠性,并开展了关键测图环节精度分析,验证测图方案的有效性和实用性。
2 项目概况
本项目测区位于青岛市城阳区某社区,测区面积约0.86 km2,测区范围内北侧为工业厂房、中间有林地、西南侧为工业厂房、东南侧为机车停车场,环境复杂、地物较多具有典型性和代表性。
项目要求测区平面坐标采用青岛城市坐标系,高程则采用1985国家高程基准,进行1∶500大比例尺测图。
本项目中采用消费级四旋翼无人机搭载自稳云台和相机完成稳定的航拍成像。无人机型号是DJI INSPIRE 2四旋翼无人机搭载禅思X5S云台相机搭配Panasonic Lumix 15mm/1.7镜头,相机视场角
3 项目实施
基于消费级多旋翼无人机的航摄特点、项目区域现状、可利用资料和任务要求,制定项目实施方案流程,项目生产实施可分为3个部分,详情见图1。
图1
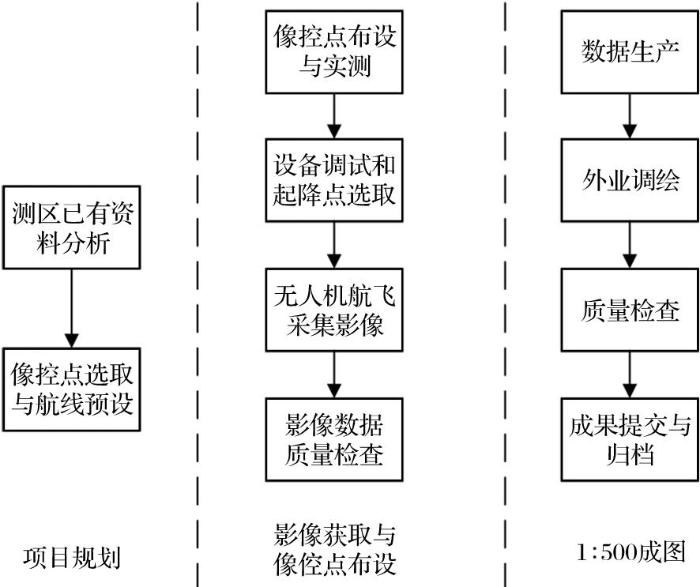
3.1 项目规划
测区现有200 7年1∶500数字线划图一幅,平面坐标为青岛城市坐标系,高程系统为1985国家高程基准。但是由于测区内地物变化大,已有的数字线划图能提供的作用较小。本项目区域位于青岛CORS(Continuously Operating Reference Stations,CORS)网覆盖范围内,可提供优于1cm精度的定位[8]。测区东北角有二等水准点一个,点保存良好,可用作实测前校准检核。
根据本次采用的消费级四旋翼无人机GNSS定位信息精度差、采集影像像幅小、测区情况复杂等因素,为保证测图精度计划在测区布设控制点132个,后期可作像控点、检查点和质检点。为易于分辨和识别,地面控制点标志采用黑白两种颜色进行标识可形成良好的色彩反差,地面控制点标志和设计布控位置见图2。
图2
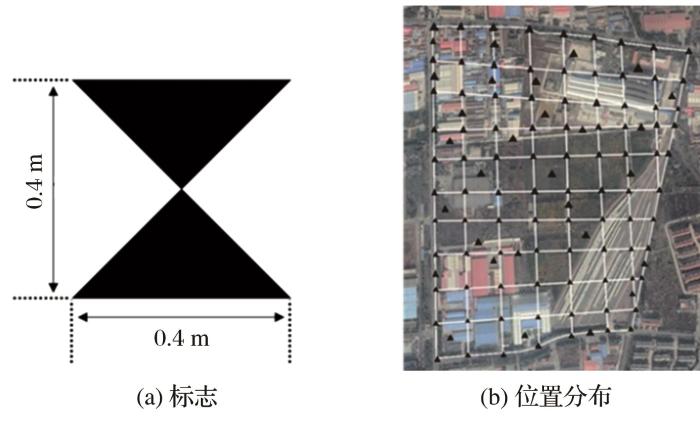
图2
地面控制点标志和位置分布设计
Fig.2
Ground control point sign and position distribution design
测区内呈现西南、东南、东北3个地区偏低,并向西北角缓慢增高的地势情况,区域内最低点和最高点高程差不超过20 m,测区中间东西向道路路面高程在测区中处于中间值。测区位于飞行限高范围内,最大航高不得超过120 m,为保证安全和项目需要,项目实施方案中预计将测区中间东西向道路上为起降场地、航高100 m,飞机采用最大航速飞行可提高姿态稳定程度。计算按照预计航高得到的影像是否满足测图的需要,根据航高和地面分辨率关系:
其中:H为摄影行高,单位为m;
根据项目相机参数、航高和
预设航向重叠75%、旁向重叠65%。摄区覆盖范围应满足《1∶500 1∶1 000 1∶2 000地形图航空摄影规范》(GB/T6962-2005)中的要求,航向覆盖超出摄区边界线一般不少于一条基线,旁向覆盖超出摄区边界线一般不少于像幅
3.2 数据获取
根据项目设计的地面控制点分布结合现场实际情况共布设108个控制点,采用青岛CORS系统进行RTK(Real Time Kinematic,RTK)测量,使用的接收机在RTK测量时平面精度为
地面控制点实际布设位置分布和标志航摄效果和见图3。
图3
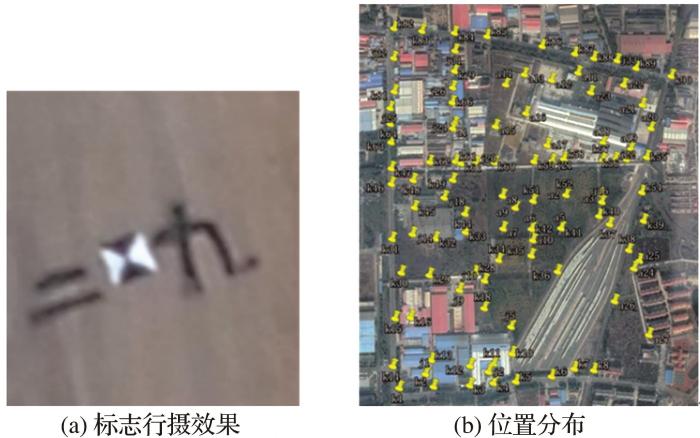
图3
地面控制点航摄效果和位置分布
Fig.3
Aerial control effects and location distribution of ground control points
航摄时天气晴朗,西南风1~3级,在地面控制点标志布设完成后,检查无人状态和相机状态后,无人机按照规划路线于测区中间东西向道路边升空进行影像数据采集。影像采集过程中一个技术员通过地面站对无人机工作状态进行实时监控,无人机机长时刻关注无人机的状态、风速飞行高度及速度指标,如果发现异常应立即做出判断和处理,如正常即按照预定路线返航降落,影像采集全程实际飞行4个架次,时间为11:30~13:45,该时间内阴影面积小,但是光线强烈,需要在正式采集前调整好合适的光圈控制进光量防止曝光过度。获取地面分辨率优于0.03 m的原始影像相片1 546张。
现场对航飞数据进行整理,检查飞行轨迹和参数是否一致,是否有漏拍现象;检查影像质量,是否有模糊或曝光过度的情况,若无质量问题完成本次航摄任务。
3.3 数据生产
数据生产前对原始影像进行质量检查,POS(Positioning and Orientation System,POS)数据和控制点数据进行整理。POS数据的平面坐标通过软件导出后可用测区的七参数转换到项目所需的坐标系,实践发现POS数据中特别是高程整体偏差太大,可根据起降场地的实际高程和航高给予改正。
空中三角测量时通过对控制点点位调整优化平差,最终从实测的108个控制点中选取38个点作为像控点、15点作为检查点,摄站点、测区范围和像控点、检查点分布见图4,其中黑线框内为本项目测区,圆点表示摄站点,三角形表示像控点,方形点表示检查点。
图4
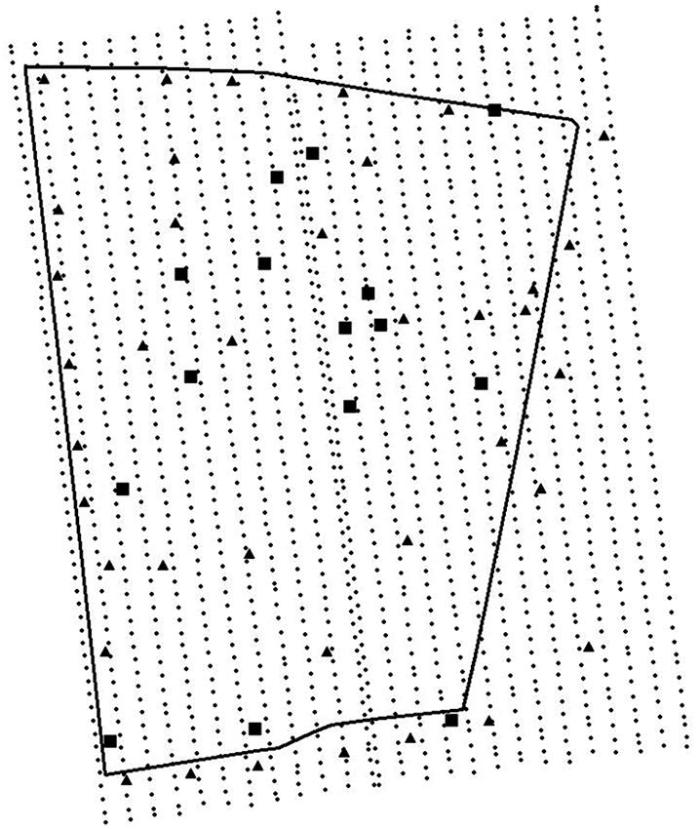
图4
航带分布和像控点、检查点分布
Fig.4
Distribution and distribution of navigation points and checkpoints
为了提高内业成图的精度,本项目生成平均地面采样间隔为2.17cm的DSM(Digital Surface Model,DSM)和DOM(Digital Orthophoto Map,DOM),见图5。
图5
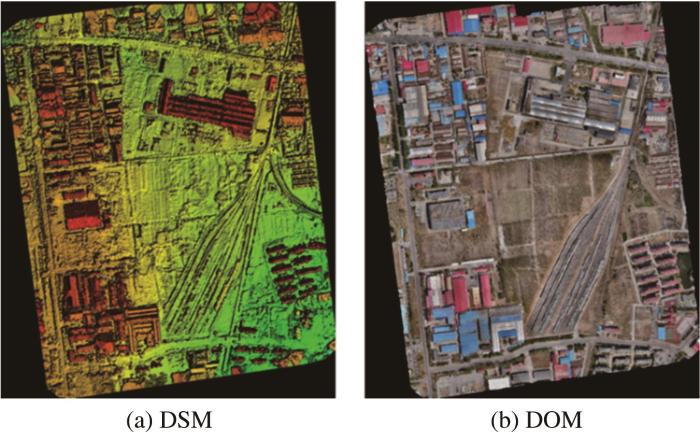
图6
图7

3.4 项目投入情况
项目共计投入人力和设备情况统计见表1。第一次外业用于开展地面控制点布测和航摄任务,共6人参与:首先6人快速制作地面控制点标志,然后其中2人进行航摄任务、另外4人进行地面控制点测量,实际野外工作时间约7 h。内业生产:2名技术员分别进行DSM、DOM、点云和测区三维模型的制作用时9 h,数字线划图的制作2名技术员每天工作9 h,共5 d。第二次外业用于开展调绘任务,因为一些原来需要通过野外调绘确认的内容已经在内业生产过程中已经通过测区三维模型进行了数字调绘,所以在实际野外调绘时已经有目的性,针对在三维模型上不能确定的内容“定点”进行调绘作业,4人总计工作6 h。
表1 项目投入
Table 1
| 任务类别 | 人员/人 | 设备 | 用时/d |
|---|---|---|---|
地面控制点 布测和航摄 | 6 | 车一辆 GNSS接收机两台 DJI INSPIRE 2四旋翼无人机一架 X5S云台相机15mm/1.7镜头 无人机电池8块 | 1 |
| 内业生产 | 2 | 工作站二台 Pix4DMapper一套 INPHO一套 ContextCaptureCenterMaster一套EPS地理信息工作站两套 | 6 |
| 外业调绘 | 4 | 车一辆 GNSS接收机两台 | 1 |
4 项目精度验证分析
4.1 空三区域网平差精度
其中:
表2 绝对定向与区域网平差精度限差 (m)
Table 2
| 成图比例尺 | 点别 | 平面位置中误差 | 高程中误差 |
|---|---|---|---|
| 1∶500 | 基本定向点 | 0.130 | 0.200 |
| 检查点 | 0.175 | 0.280 |
表3 空中三角测量精度 (m)
Table 2
| 点别 | 误差类型 | X | Y | Z |
|---|---|---|---|---|
| 基本定向点 | 中误差 | 0.092 | 0.087 | 0.040 |
| 最大误差 | 0.177 | -0.145 | 0.115 | |
| 检查点 | 中误差 | 0.054 | 0.075 | 0.098 |
| 最大误差 | 0.137 | 0.149 | -0.161 |
4.2 数字线划图精度
表4 地物点平面位置和高程精度要求 (m)
Table 4
| 成图比例尺 | 点别 | 平面位置中误差 | 高程中误差 |
|---|---|---|---|
| 1:500 | 平面位置 | 0.17 |
图8
4 结 语
本文从应用实践出发,基于消费级四旋翼无人机进行1∶500大比例尺测图任务,制定项目实施方案,进行精度分析,成果满足大比例尺地形图测绘的精度要求,主要结论如下:
(1)方案根据实际需求进行设计和实施,相对其它采用消费级多旋翼无人机进行大比例尺测图的实验,本方案具有实践意义,数据可靠并能为其他项目实施提供有力的参考依据。
(2)基于消费级多旋翼无人机的大比例尺测图方案可行、可靠。可提供快速完成测绘任务的解决方案,具有较低的劳动强度和较小的经费开支,该方案是一种行之有效具有实际应用价值。
(3)实景三维模型辅助内业成图的工作模式能够大幅减少外业调绘工作量。最大限度挖掘外业采集的数据的的利用效,利用采集的影像生成测区实景三维模型辅助内业成图,可将原来需要外业调绘的一部分工作内容在室内完成。
消费级多旋翼无人机产品技术成熟,更新换代快,相对于测绘专业型多旋翼无人机价格低廉,适合小型测绘企业或小范围测图任务,在测绘领域具有推广应用价值。
参考文献
Research Advance and Application Prospect of Unmanned Aerial Vehicle Remote Sensing System
[J].
无人机遥感系统的研究进展与应用前景
[J].
UAV Integration with Ground Scanner of Terrain Measurement
[J].
空地一体化地形测量
[J].
Rapid Construction of High Precision DSM by Using Unmanned Aerial Vehicle (UAV) Free Image Control
[J].
利用无人机免像控快速构建高精度DSM
[J].
On Influence of Post-processed Difference Technique and Image Control Point Density on UAV Photogrammetry Accuracy
[J].
后差分技术及像控点密度对无人机摄影测量精度影响研究
[J].
Analysis of Accuracy between DGPS-supported Aerotriangulation and Airborne Flight Control System GPS-supported Aerotriangulation
[J].
Topographic Data Accuracy Verification of Small Consumer UAV
[J].
小型消费级无人机地形数据精度验证
[J].
Application and Precision Evaluation of Consumer UAV to Large Scale Mapping
[J].
消费级无人机在大比例尺测图中应用与精度评价
[J].
Precision Analysis of the Experimental Sites on Campus based on the Qingdao CORS System
[C]∥
基于青岛CORS系统下的实验场地的精度分析
[C]∥
Relationship between Ground Resolution and Flying Height about the Low Altitude Unmanned Aerial Vehicle Aerophotographic System
[J].
低空无人机航摄系统地面分辨率与航高的关系研究
[J].
GPS-supported Aerotriangulation based on GPS Precise Point Positioning
[J].
基于精密单点定位技术的GPS辅助空中三角测量
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}