1 引 言
在植被定量遥感中,辐射传输建模是理解冠层与太阳辐射之间相互作用机制以及从遥感信号反演植被参数的重要基础。然而由于地物的复杂性,难以建立起遥感信号与植被参数之间的简单数学关系,因此传统遥感模型往往对地物的结构特征进行简化和抽象描述。例如,将植被冠层简化为水平均匀分布的叶片,从而发展了一系列的一维辐射传输模型[1 -2 ] ;或者将树冠抽象为简单的几何体而发展了几何光学模型[3 -4 ] 。但是,这些模型往往难以描述精细的植被结构,因此近年来能够准确描述空间异质性的三维辐射传输模型受到了越来越多的重视。
此外,随着高分辨率三维数据(例如激光雷达数据)的丰富,如何充分利用这些信息并与辐射传输理论相结合来反演更高精度的地表参量成为定量遥感研究中的一个新问题,并且已得到国内外相关学者的关注[5 -6 ] 。由于三维辐射传输模型可以描述任意复杂的场景结构,能够更大限度地利用多源遥感数据所提供的信息量,因此三维辐射传输模型正是解决这一问题的理想工具。
在过去20多年中,遥感领域已经发展了一系列的三维辐射传输模型,例如基于辐射度算法的RGM模型[7 ] 和RAPID模型[8 ] 、基于光线追踪的Raytran模型[9 ] 以及基于离散坐标法的DART模型[10 ] 等。从现有模型来看,光线追踪算法由于其良好的扩展性,在三维辐射传输模型中使用的频率更高,并且已经得到了较多的应用[11 -12 ] ,但光线追踪算法本身又有多种实现方式,从而也导致了各个模型之间存在显著的差异。
根据发射光线起点的不同,光线追踪算法可分为前向光线追踪和后向光线追踪。前向光线追踪从光源发射光线,并跟踪光线在场景中的传播过程,从而模拟所需的遥感信号,典型的模型有Raytran、FLIGHT[13 ] 、FLiES[14 ] 、Rayspread[15 ] 以及FluorWPS[16 ] 等。Raytran模型从光源发射单色光,根据场景元素的光学属性决定光线是否被吸收或者被散射,最终通过统计逃逸出场景的光线数量以及光线所携带的能量来估算反射率。虽然Raytran模型这种实现方式简单,但是计算效率较低,且难以同时模拟多波段的反射信号。为了解决Raytran模型的效率问题,Widlowski等[15 ] 在Raytran的基础上发展了Rayspread模型,通过在每个光线碰撞点处向观测方向发射“子光线”(secondary rays)来估算反射率,提高了计算效率和精度。利用同样的原理,Zhao等[17 ] 提出了进一步考虑权重变化、可进行高光谱和荧光信号辐射模拟的Weighted Photon Spread (WPS)模型和FluorWPS模型。后向光线追踪从传感器发射光线,并计算辐射源沿该光线传播到传感器的辐亮度值。后向光线追踪的主要优势在于只计算了恰好进入传感器部分的能量,因此在模拟影像方面具有较大的优势,但是难以计算能量平衡问题。典型的后向光线追踪模型是DIRSIG模型[18 ] ,由于后向光线追踪的特点,该模型尤其适合于研究传感器参数对遥感信号的影响,是辅助传感器设计的有力工具,但是该模型的主要问题是难以共享使用。因此,能够同时进行前向光线追踪和后向光线追踪以应对不同的模拟需求则显得尤其重要,同时也是现有模型所欠缺的功能。
现有三维辐射传输计算机模拟模型所面临的另一个问题是计算效率低以及模拟场景小。为了提高计算效率,常用的做法是简化场景结构,例如FLIGHT模型将树冠表示为简单几何体(椭球体等)以简化光线与场景的求交运算;RAPID模型将树冠表示为孔隙面元,从而减少场景中的面元数量,以扩大模拟范围以及提高计算效率。因此目前遥感领域急需发展一个既能表达真实场景结构又能高效率模拟大场景的三维辐射传输模型。
近年来,光线追踪技术在计算机图形学领域内得到了长足的发展,涌现了一批高效率的物理渲染引擎,这些引擎能够从虚拟的三维场景中渲染逼真的图像,例如LuxCoreRender(https://luxcorerender.org/ )、PBRT[19 ] 以及POV-Ray[20 ] 等。这些渲染引擎充分地使用了最新的加速计算技术(例如GPU),极大地提高了场景的渲染效率。然而直接将这些渲染引擎应用于遥感信号的模拟并不是一件容易的工作,其主要原因在于这类渲染引擎主要关注图像的逼真程度,而不是物理量的准确性。部分模型只能模拟RGB 3个宽波段,而无法模拟遥感场景的多光谱或者高光谱影像。因此,在这些引擎基础上进行修改或者利用这些引擎提供的加速结构重新实现遥感信号的模拟是一个更为可行的方案。例如,Auer等[21 ] 基于POV-Ray开发了三维场景的SAR信号模拟器;DIRSIG模型最近对其核心部分进行了重构,以利用最新的图形学技术加速其计算过程[22 ] ;DART模型在其核心部分集成了Intel公司开发的Embree光线追踪库,其计算效率得到了较大的提升。
基于以上考虑,利用Mitsuba[23 ] 渲染软件所提供的加速框架发展了基于光线追踪算法的三维真实冠层辐射传输模型LESS[24 ] (LargE-Scale Remote Sensing Data and Image Simulation Framework),该模型能够同时进行前向光线追踪以及后向光线追踪,同时充分利用了最新图形学技术以实现更准确和更高效的大场景遥感信号的模拟。本文主要介绍了LESS的基本原理、主要功能以及典型的应用案例,为利用LESS模型进行定量遥感建模研究提供参考。
2 LESS基本原理
在LESS模型中,根据光线出发的位置,分别实现了前向光子追踪算法和后向光线追踪算法。前向光子追踪从光源发射光子,并模拟光子在整个场景中的传播过程,通过对光子能量的记录,可以模拟场景的反射率、FPAR(Fraction of Absorbed Photosynthetically Active Radiation)以及上下行辐射等遥感数据。后向光线追踪从传感器发射光线,因此适合模拟遥感多/高光谱影像以及各种投影模式的相机。
2.1 前向光子追踪算法
在LESS前向光子追踪模式中,光子从光源出发进入场景并与场景中的元素进行求交运算。典型的光源有太阳直射光和天空散射光,一般太阳直射光作为平行光处理,而天空散射光作为各向同性入射光处理。对于直射光而言,LESS将其表示为一个投影后能够覆盖整个场景的圆盘,该圆盘的大小和位置由场景的外接球确定,这种方式能够保证在任意太阳入射角下,入射辐射能够覆盖整个场景。因此,整个直射光源的发射功率为L d i r = π r 2 E d i r r E d i r 2 )为沿太阳入射方向的辐照度。对于散射光而言,光子的起始位置位于包围整个场景的一个半球之上,其半径通常为外接球的2~3倍,因此天空散射光的发射功率为L d i f f = 2 π 2 R 2 I d i f f R I d i f f
当产生入射光子时,每个光子的入射能量(瓦特)可表示为:
P 0 λ = L d i r + L d i f f N (1)
其中:N N w k = L k ( λ ) ∑ k = 1 K L k ( λ ) K
2.1.1 真实光子跟踪算法
当光子进入场景后,可能与场景中的元素发生碰撞,在每一个碰撞点,光子的能量将变为:
P Q λ = P 0 λ ∙ ∏ q = 1 Q π f ( q , ω i , ω o , λ ) / p q (2)
其中:Q f ( q , ω i , ω o , λ ) q p q p q
当光子从场景顶部逃离场景后,能够被放置于场景顶部的虚拟半球所搜集,该半球通常被划分为多个等面积的面元,利用每个面元的立体角可以估算该方向的场景反射率。
f B R F i = π P i A ∆ Ω i ∙ c o s θ i c ∙ P s c e n e (3)
其中:P i A i P i A = ∑ P Q ∈ ∆ Ω i P Q ∆ Ω i θ i c i P s c e n e p p = 0.05 1 1 - p
2.1.2 虚拟光子算法
在真实光子算法中,反射率的估算要借助于一个微小立体角,但是该立体角内的光子方向仍然有一定的差异,从而导致在热点附近产生较大的低估。此外,当立体角内搜集的光子数量不足时,估算的反射率会有较大的误差。为解决该问题,LESS模型提出了虚拟光子算法,即当光子与场景元素发生碰撞且未被完全吸收的情况下,将会沿观测方向(虚拟方向)发射一个虚拟光子,用于计算入射光经过碰撞点可能沿观测方向所散射的能量(W ∙ s r - 1
I = V ∙ P q - 1 ∙ f ( q , ω i , ω v ) ∙ c o s < ω v , ω n > (4)
其中:P q - 1 q ω v V V = 0 V = 1
f B R F v = π I v A c o s θ v ∙ P s c e n e (5)
式中:I v A v W ∙ s r - 1 θ v [25 ] 。
2.2 后向光线追踪算法
2.2.1 一次散射
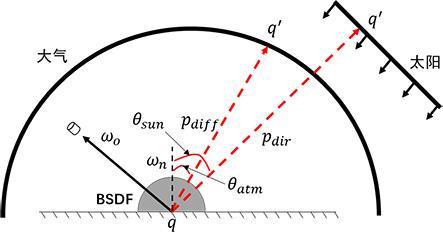
后向光线追踪从传感器发射光线,经过与场景元素求交后找到与光源之间的一条路径,并计算光源沿该路径散射到传感器的辐亮度,因此后向光线追踪也称为后向路径跟踪。如图1 所示,当光线找到与场景元素的交点q q p d i r = p d i f f = 0.5
图1
图1
后向光线追踪表面散射计算过程
Fig.1
Surface scattering calculation in backward path tracing
(1)如果选择了太阳,那么将从q q ' q q ' E d i r / p d i r e c t i o n s u n p d i r e c t i o n s u n p d i r e c t i o n s u n = p d i r ∙ 1
(2)如果选择了大气,将在q q q ' q q ' I d i f f / p d i r e c t i o n a t m p d i r e c t i o n a t m q p d i r e c t i o n a t m = p d i f f c o s θ a t m π θ a t m q
上述过程相当于对光源进行了采样,要计算入射光线经过q q q p b s d f a t m = c o s θ a t m π p b s d f s u n = c o s θ s u n π [26 ] ,它们的组合概率为:
p w e i g h t s u n = p d i r e c t i o n s u n 2 p d i r e c t i o n s u n 2 + p b s d f s u n 2 , p w e i g h t a t m = p d i r e c t i o n a t s 2 p d i r e c t i o n a t m 2 + p b s d f a t m 2 (6)
L s u n = E d i r p d i r e c t i o n s u n ∙ p w e i g h t s u n ∙ f q , ω i , ω o ∙ c o s θ s u n = E d i r c o s θ s u n p d i r ∙ p w e i g h t s u n ∙ f q , ω i , ω o (7)
L a t m = I d i f f p d i r e c t i o n a t m ∙ p w e i g h t a t m ∙ f q , ω i , ω o ∙ c o s θ a t m (8)
= π I d i f f p d i f f ∙ p w e i g h t a t m ∙ f q , ω i , ω o
在此计算过程中所涉及到的多重重要性采样技术能够同时考虑到光源和BSDF的特性,尤其适合于非朗伯表面散射的计算。
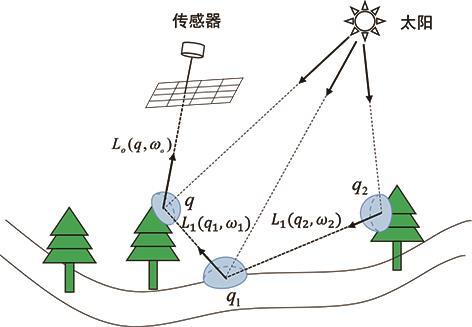
2.2.2 多次散射
对于多次散射的计算,将从第一个碰撞点q q 1 图2 ),将在q 1 q 1 ω 1 q q p 1 1 - p
图2
图2
后向光线追踪多次散射计算过程
Fig.2
Multiple scattering calculation in backward path tracing
3 LESS功能模块
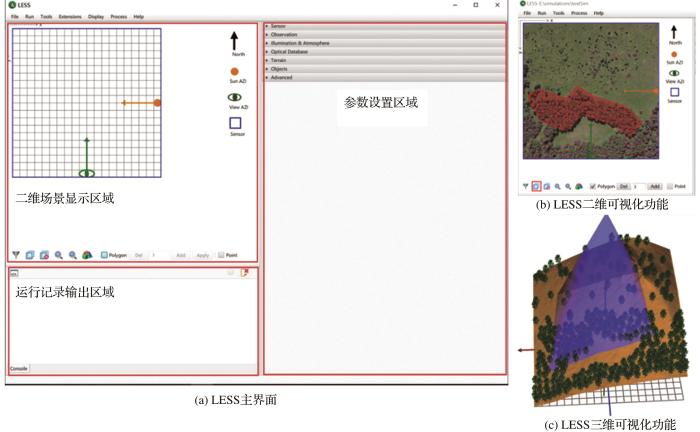
造成三维模型难以使用的原因之一是三维模型输入参数多且复杂,因此开发一个操作方便的软件是使用三维模型的重要前提。为此,基于JavaFX开发了可视化界面,并且提供了一套构建三维场景、管理输入参数以及处理输出参数的工具集。图3 (a)展示了LESS模型的主界面,主要包含场景显示区域、运行记录输出区域以及参数设置区域,其中参数设置区域又包含了传感器、观测几何、入射光照、光学属性、地形以及场景元素等若干子区域。
图3
图3
LESS模型主界面及典型功能
Fig.3
The main screen and major functionalities of LESS
3.1 三维场景构建
一个典型的三维场景包含了地形和一些场景元素(例如树和房子)。LESS模型支持3种类型地形文件格式,分别为平面(PLANE)、栅格影像(RASTER)和三角网(MESH)。其中栅格影像支持ENVI标准格式和GeoTIFF格式,而三角网则支持Wavefront OBJ格式。
在LESS中,场景元素均以三角网格式进行描述(Wavefront OBJ),这些元素的结构一般由外部软件产生,例如通过Onyx Tree(http://www.onyxtree.com/ )可以产生较为逼真的单木结构。当这些元素被导入到LESS模型中时,需要对其中包含的每一个组分(例如枝干和叶片)设定对应的光谱属性,但是此时的场景元素并没有立即出现在场景中,而是需要对其设定相应的地理位置。为了提高模拟效率,LESS模型采用几何变换的形式将每一个物体放置在场景中,因此一个物体可以被“复制”多次,但在此过程中只保存了一系列的变换矩阵,避免了将整个元素的所有三角网进行完全复制。通过这种方式可以以较小的计算资源模拟更大的场景(例如单木组成的森林),节省计算内存。
在三维场景构建中,LESS也提供了一些便利的工具来辅助场景的构建,例如多边形编辑工具可以在任意绘制的多边形内放置随机分布的物体,或者删除任意绘制的多边形内的物体(图3 (b))。
3.2 三维场景展示
由于三维模型的场景往往比较复杂且计算时间较长,因此在计算之前有必要检查所创建的场景是否正确或者符合预定的目标。LESS模型基于JavaFX 3D开发了三维场景展示工具,该工具能够将栅格地形文件自动转换为三角网,并自动计算场景元素对应的高程信息,从而展示正确的三维场景。此外,三维场景展示工具也能够显示当前所设定的传感器的视场范围,可以辅助操作人员检查所设置传感器的参数是否正确。图3 (c)展示了典型的三维场景以及对应的传感器视场范围。
3.3 遥感数据模拟
根据所选择的传感器的不同,LESS模型可以模拟并输出不同的遥感数据,例如多光谱影像、鱼眼相机、多角度反射率、四分量影像等。以FPAR模拟为例,LESS模型利用前向光子跟踪算法在每一个光子与场景的碰撞点计算场景元素所吸收的能量A λ = σ λ ∙ P Q - 1 λ σ λ P A R = ∫ 400 700 A λ d λ
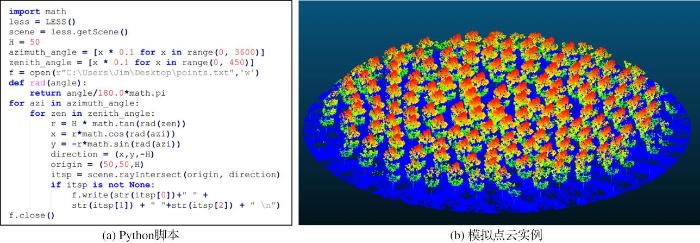
3.4 脚本模块
LESS的核心部分由C++编写而成,且提供相应的Python接口,因此可以通过Python调用LESS所提供的接口以实现其他模拟功能或进行二次开发。在LESS中,已经完整地集成了一套Python解释器,并且已经安装了常用的库。当模拟工程以及三维场景建立之后,可以通过主界面的Python命令行窗口运行Python脚本程序。图4 展示了一段Python脚本,该脚本通过朝不同方向发射光线计算交点,可以模拟场景的点云数据。
图4
图4
LESS中运行Python脚本
Fig.4
Run Python script in LESS
4 LESS应用案例
本节主要介绍了LESS各种模拟功能的应用案例,包括遥感影像模拟、下行辐射模拟、FPAR模拟以及分析木质元素对冠层反射率的影响,并且对部分模拟结果(4.1~4.3节)与实测数据进行了对比验证。
4.1 遥感图像模拟
从激光雷达获取三维结构信息并结合光谱信息模拟遥感信号是目前三维辐射传输模型的应用方向之一,因为激光雷达提供了前所未有的精细结构信息,这些信息正是三维辐射传输模型所必需的。通常而言,从激光雷达数据重建三维虚拟森林场景有两种方式,一是基于体元的方法[27 ] ,二是基于单木的方法[28 ] 。本节主要介绍基于单木重建场景并进行遥感影像模拟的方法。
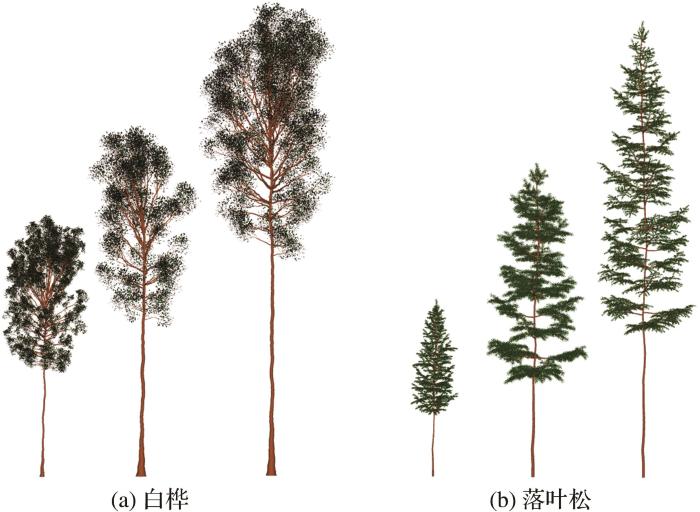
首先利用Onyx Tree生成了6棵典型的单木,其中3棵白桦,3棵落叶松(如图5 所示)。单木的位置和树冠由机载激光雷达数据得到,对于每一个检测到的单木,为了从这6棵单木中找到最合适的单木,定义了一个相似因子,即S F = 0.5 ⋅ H d - H o H o + 0.5 ⋅ C d - C o C o H d C d H o C o S F
图5
图5
Onyx Tree生成的单木
Fig.5
Individual Trees generated by Onyx Tree
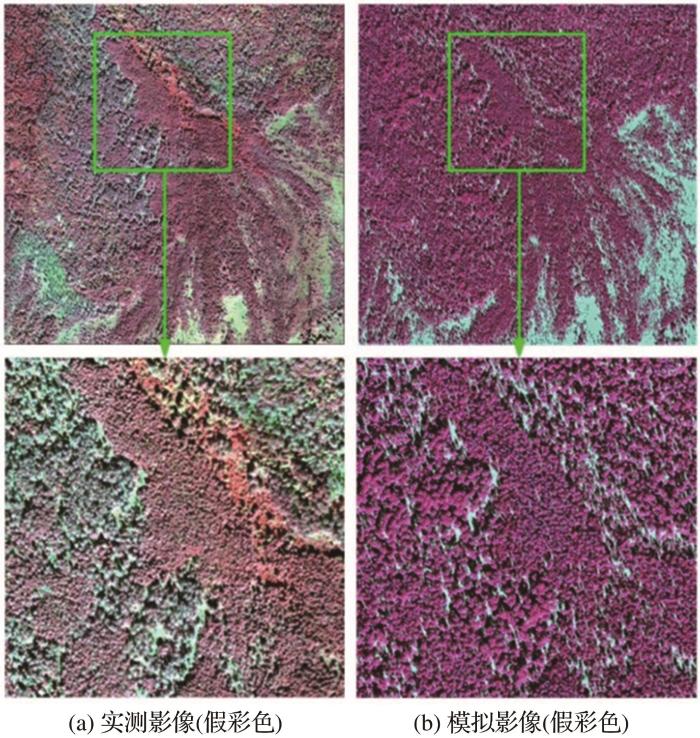
整个场景范围为1 km×1 km,约有50 000棵单木,模拟影像的分辨率为1 m,波段数量为64,模拟时间约为30 min(16 GB内存,8核心笔记本)。实测数据为图5 展示了模拟影像与实测影像之间的对比(假彩色),其中实测影像为机载高光谱数据,高光谱传感器为AISA Eagle II,该仪器能够记录从400~970 nm之间的64个波段,空间分辨率约为1 m。总体来看,模拟影像与实测影像在纹理上比较相似,尤其是在树木比较稀疏的区域,因为在此区域单木分割的精度更高。在样方尺度,树高树冠幅的分布也与真实影像比较接近,因为在构建场景时主要根据单木的树高的冠幅进行单木的选择。但是,两幅影像最大的区别在于颜色(光谱),模拟影像的颜色更为单一,而实际影像表现较强的空间异质性,这主要是因为模拟场景中所有的树木都采用了相同的组分光谱。尽管如此,模拟数据可以为提供场景真实的结构参数(比如LAI),以及对应的反射率,可以为验证其他物理模型提供数据基础。此外,基于单木的方法具有每棵单木的细节(到叶片层次),在模拟一些高分辨率影像(例如无人机影像)时具有较大的优势。
图6
图6
模拟影像与实测影像的对比
Fig.6
Comparison of the simulated image and actual image
4.2 下行辐射的模拟
地形起伏对于太阳短波下行辐射的估算具有较大的影响,具体表现在起伏地形对太阳和天空光的遮挡以及周围地形的相互作用。通过模拟复杂地形条件下的短波下行辐射,可以定量评估不同地形对下行辐射的影响,也可以为实际测量中的布站优化提供参考依据,以最少的测量站点获得更具有区域代表性的观测值。
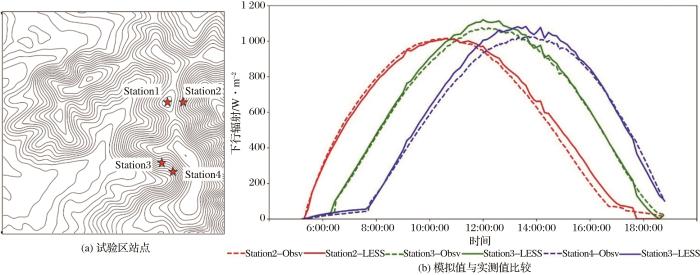
LESS模型可以模拟具有真实结构复杂地形条件每个像元的短波下行辐射值。以承德月亮山试验区(42.05778N, 117.0656E)为例,利用该地区真实的地形数据,开展短波下行辐射的模拟分析并与实际测量值进行了比较。该试验区一共有4个观测站点,分别位于山顶(Station1)、东坡(Station2)、南坡(Station3)以及西坡(Station4)。由于山顶站点受地形影响最小,因此在该模拟中将山顶站点测量的直散射数据作为大气底层入射辐射输入到LESS模型中,并模拟其余3个站点的下行辐射值。在模拟过程中,用到的DEM数据为从资源三号(ZY-3)立体像对得到的12.5 m分辨率的地形数据。
图7 (b)展示了2015年8月15日(晴空)的模拟结果以及与实测数据的对比,模拟的时间间隔为9 min。从对比结果可以看出,模拟数据与实测数据在各个时刻都具有较高的一致性。东坡、南坡以及西坡的相关系数都为0.99,RMSE分别为33.7 W·m-2 ·μm-1 、14.6 W·m-2 ·μm-1 和22.9 W·m-2 ·μm-1 。对于东坡,模拟值在12:00之后比实测值偏高,而南坡和西坡则在中午时出现较大的偏差,这些偏差主要是由于实测数据以及地形数据的不确定性引起的,例如辐射表安装时可能与实际坡面不平行,DEM分辨率较粗而与实际地形有一定的偏差。从3个站点之间的对比结果来看,东坡首先到达最大值(10:30左右),其次是南坡(12:00左右),最后是西坡(14:00左右),这种最大值的变化规律也符合太阳一天的方位角变化规律。此外,由于地形遮蔽的影响,东坡在18:00附近出现辐射值的突变,而西坡和南坡分别在6:30和7:30附近出现突变。以上分析说明,LESS模拟的辐射值与实测值具有较好的一致性,正确地反映地形对于下行辐射的影响。
图7
图7
复杂地形区LESS短波下行辐射模拟(Obsv表示观测值,LESS表示模拟值)
Fig.7
Solar shorwatve radiation simulation over rugged terrains (Obsv stands for actual measurement and LESS stands for simulated data)
4.3 FPAR模拟
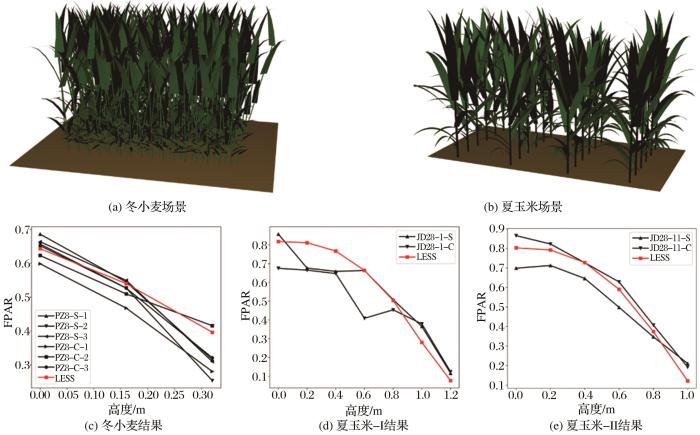
LESS模型可以模拟冠层分层FPAR,用于验证其他物理模型或者发展参数化反演模型。此处选择了实测的冬小麦和夏玉米FPAR数据集[29 ] 对LESS的FPAR模拟结果进行了对比和分析。该数据集获取于北京市昌平区小汤山国家农业精准实验基地,数据获取时间为2008年4月27日(冬小麦)和2010年8月29日(夏玉米),其中夏玉米包含两个播种期的植株:处于喇叭口期的夏玉米-I以及处于拔节期的夏玉米-II。冬小麦和夏玉米的参数(株高、垄距、光谱以及LAI等)通过实测获得。冬小麦选择了3个样点,分别沿顺垄方向(PZ8-S)和垂直垄方向(PZ8-C)各测量了一次,夏玉米选择了1个样点,同样地,在该样点处沿顺垄方向(JD28-I-S和JD28-I-S)和垂直垄方向(JD28-II-S和JD28-II-S)分别测量了1次。在每个测量样点,利用SUNSCAN冠层分析仪从冠层顶部到底部每隔16 cm(冬小麦)/20 cm(夏玉米)向上及向下各测了1次上行和下行PAR,从而得到不同高度处的FPAR。
LESS分层FPAR的模拟结果以及实测FPAR如图8 所示。从该图可以看出,冬小麦实测的3个样点的FPAR值具有相似的规律,即随着观测高度的增加而降低。但是在同一高度处,不同样点之间的测量值具有一定的差异,尤其是冠层顶部差异较大,导致该差异的主要原因是不同样点之间的作物生长状态可能存在较大的不同。由于类似的原因,夏玉米在不同高度处的测量值差异也较大。不过从冬小麦和夏玉米的模拟结果来看,模拟的FPAR值与实测值比较接近,处于多次测量值的范围内,说明利用LESS进行FPAR的模拟具有较高的精度。通过模拟的方式来研究FPAR与植被结构之间的关系,可以有效地避免地面测量过程中的人为误差,对定量地分析FPAR的影响因素具有重要的意义。
图8
图8
LESS模拟FPAR模拟
Fig.8
FPAR simulations in LESS
4.4 分析木质元素对反射率的影响
辐射传输模型是利用遥感数据定量反演参数的基础。目前多数植被辐射传输模型在反演参数时,将植物结构进行简化,忽略了木质元素的影响。然而真实场景中,木质元素作为植物重要组成部分,对植物结构以及植物的理化特性都有重要影响。作为验证其他模型的验证工具之一 ,LESS模型不仅可以实现场景内更接近现实世界的植物结构模拟,还可以方便地改变植被结构假设,研究植被不同结构对方向反射率的影响。
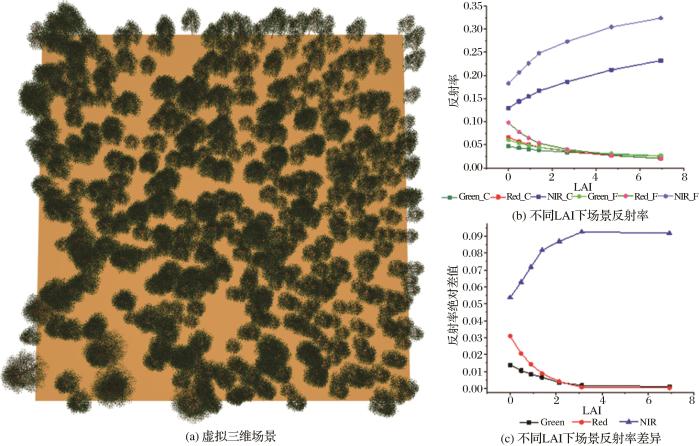
图9 展示了1个虚拟针叶林样方在不同叶面积情况下有枝干和无枝干的反射率差异,图中单木由Onyx Tree软件生成,通过调节叶片密度,从而实现相同枝干不同叶面积单木的生成。图中C表示场景只有土壤和枝干,F表示场景既有土壤和枝干,也有叶片。由于植被场景在红光和绿光波段的反射率值比较低,因此,枝干反射率在这两个波段引起的差异也相对较小。最大的相对差值出现在LAI为0,即没有树叶的场景下,所有差异全部来源于枝干。随着叶片的增加,LAI增大,场景在红光和绿光波段的反射率值降低,其绝对差值也逐渐减小,并在LAI大于3以后趋于稳定。与之相对应地,场景在近红外波段反射率随着LAI的增加而增大,且两类场景在该波段的反射率绝对差值也逐渐增加。
图9
图9
枝干对场景反射率的影响
Fig.9
Reflectance influenced by branches
5 结 语
本文主要介绍了基于光线追踪的三维辐射传输模型LESS的基本原理以及典型的应用案例。与目前已有的模型(例如DART)相比,LESS模型的主要优势在于能够以较高的效率模拟具有真实结构的复杂大场景的各种遥感信号,并且针对不同模拟数据采用了不同的模拟策略(前向和后向光线追踪)。此外,LESS模型参数设置更为简单,与算法本身有关的参数更少,更利于普通用户的理解和使用。为简化三维模型的使用难度,LESS模型提供了简单易用的GUI程序,该程序包含了参数输入、三维场景构建、三维场景显示、模拟计算以及后处理等一系列工具。未来,LESS模型将会继续完善大气以及云辐射、热红外、激光雷达以及荧光等模拟。
参考文献
View Option
[1]
Verhoef W Light Scattering By Leaf Layers With Application To Canopy Reflectance Modeling: the SAIL model
[J]. Remote Sensing of Environment , 1984 , 16 (2 ): 125 -141 .
[本文引用: 1]
[2]
C van der Tol Verhoef W Timmermans J et al An Integrated Model of Soil-Canopy Spectral Radiances, Photosynthesis, Fluorescence, Temperature and Energy Balance
[J]. Biogeosciences , 2009 , 6 (12 ): 3109 -3129 .
[本文引用: 1]
[3]
Li X Strahler A H Geometric-Optical Bidirectional Reflectance Modeling of a Conifer Forest Canopy
[J].IEEE Transactions on Geoscience and Remote Sensing ,1986 ,GE-24(6 ): 906 -919 .
[本文引用: 1]
[4]
Ni W Li X Woodcock C E et al An Analytical Hybrid Gort Model for Bidirectional Reflectance over Discontinuous Plant Canopies
[J]. IEEE Transactions on Geoscience and Remote Sensing , 1999 , 37 (2 ): 987 -999 .
[本文引用: 1]
[5]
Koetz B Sun G Morsdorf F et al Fusion of Imaging Spectrometer and Lidar Data over Combined Radiative Transfer Models For Forest Canopy Characterization
[J]. Remote Sensing of Environment , 2007 , 106 (4 ): 449 -459 .
[本文引用: 1]
[6]
Zhu X Skidmore A K Darvishzadeh R et al Estimation of Forest Leaf Water Content through Inversion of A Radiative Transfer Model from Lidar And Hyperspectral Data
[J]. International Journal of Applied Earth Observation and Geoinformation ,2019 , 74 : 120 -129 .
[本文引用: 1]
[7]
Qin W Gerstl S A 3-D Scene Modeling of Semidesert Vegetation Cover And Its Radiation Regime
[J]. Remote Sensing of Environment , 2000 , 74 (1 ): 145 -162 .
[本文引用: 1]
[8]
Huang H Qin W Liu Q RAPID: A Radiosity Applicable to Porous Individual Objects for Directional Reflectance over Complex Vegetated Scenes
[J]. Remote Sensing of Environment ,2013 , 132 : 221 -237 .
[本文引用: 1]
[9]
Govaerts Y M Verstraete M M Raytran: A Monte Carlo Ray-Tracing Model to Compute Light Scattering in Three-Dimensional Heterogeneous Media
[J]. IEEE Transactions on Geoscience and Remote Sensing , 1998 , 36 (2 ): 493 -505 .
[本文引用: 1]
[10]
Gastellu-Etchegorry J P Martin E Gascon F DART: A 3D Model for Simulating Satellite Images and Studying Surface Radiation Budget
[J]. International Journal of Remote Sensing , 2004 , 25 (1 ): 73 -96 .
[本文引用: 1]
[11]
Wang Zhangang Zhuang Dafang Ming Tao Research on Simulation of the PAR Distribution in Tree Canopy
[J]. Geo-Information Science ,2008 ,10 (6 ):697 -702 .
[本文引用: 1]
王占刚 , 庄大方 , 明涛 林木冠层光合有效辐射分布模拟的研究
[J]. 地球信息科学学报 , 2008 , 10 (6 ): 697 -702 .
[本文引用: 1]
[12]
Lao Cailian Three Dimensional Canopy Radiation Transfer Model based on Monte Carlo Ray Tracing
[D]. Beijing : China Agricultural University , 2005 .
[本文引用: 1]
劳彩莲 基于蒙特卡罗光线跟踪方法的植物三维冠层辐射传输模型
[D]. 北京 :中国农业大学 , 2005 .
[本文引用: 1]
[13]
North P R J Three-dimensional Forest Light Interaction Model Using a Monte Carlo Method
[J]. IEEE Transactions on Geoscience and Remote Sensing , 1996 , 34 (4 ): 946 -956 .
[本文引用: 1]
[14]
Kobayashi H Iwabuchi H A Coupled 1-D Atmosphere and 3-D Canopy Radiative Transfer Model for Canopy Reflectance, Light Environment, and Photosynthesis Simulation in A Heterogeneous Landscape
[J]. Remote Sensing of Environment , 2008 , 112 (1 ): 173 -185 .
[本文引用: 1]
[15]
Widlowski J L Lavergne T Pinty B et al Rayspread: A Virtual Laboratory for Rapid BRF Simulations over 3-D Plant Canopies
[J]. Computational Methods in Transport , 2006 : 211 -231 .
[本文引用: 2]
[16]
Zhao F Dai X Verhoef W et al FluorWPS: A Monte Carlo Ray-tracing Model to Compute Sun-Induced Chlorophyll Fluorescence of Three-dimensional Canopy
[J]. Remote Sensing of Environment ,2016 , 187 : 385 -399 .
[本文引用: 1]
[17]
Disney M I Lewis P North P Monte Carlo Ray Tracing in Optical Canopy Reflectance Modelling
[J]. Remote Sensing Reviews , 2000 , 18 (2-4 ): 163 -196 .
[本文引用: 1]
[18]
Goodenough A A Brown S D Dirsig5: Core Design and Implementation
[C]∥SPIE Defense, Security, and Sensing . International Society for Optics and Photonics , 2012 : 83900H-83900H.
[本文引用: 1]
[19]
Pharr M Jakob W Humphreys G Physically based Rendering: from Theory to Implementation [M]. San Francisco : Morgan Kaufmann , 2016 .
[本文引用: 1]
[20]
Plachetka T POV Ray: Persistence of Vision Parallel Raytracer
[C]∥Spring Conference on Computer Graphics , Budmerice, Slovakia . 1998 : 123 -129 .
[本文引用: 1]
[21]
Auer S Hinz S Bamler R Ray-tracing Simulation Techniques for Understanding High-resolution SAR Images
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2010 , 48 (3 ): 1445 -1456 .
[本文引用: 1]
[22]
Goodenough A A Brown S D DIRSIG5: Next-generation Remote Sensing Data and Image Simulation Framework
[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing , 2017 , 10 (11 ): 4818 -4833 .
[本文引用: 1]
[23]
JAKOB W Mitsuba Renderer
[EB/OL]. , 2010 .
URL
[本文引用: 1]
[24]
Qi J Xie D Yin T et al LESS: Large-Scale Remote Sensing Data and Image Simulation Framework over Heterogeneous 3D Scenes
[J]. Remote Sensing of Environment ,2019 , 221 : 695 -706 .
[本文引用: 1]
[25]
Thompson R L Goel N S Two Models for Rapidly Calculating Bidirectional Reflectance of Complex Vegetation Scenes: Photon Spread (PS) Model And Statistical Photon Spread (Sps) Model
[J]. Remote Sensing Reviews , 1998 , 16 (3 ): 157 -207 .
[本文引用: 1]
[26]
Veach E Robust Monte Carlo Methods for Light Transport Simulation
[D]. Palo Alto : Stanford University , 1997 .
[本文引用: 1]
[27]
Schneider F D Leiterer R Morsdorf F et al Simulating Imaging Spectrometer Data: 3D Forest Modeling based on Lidar and In Situ Data
[J]. Remote Sensing of Environment ,2014 , 152 : 235 -250 .
[本文引用: 1]
[28]
Qi J Xie D Guo D et al A Large-scale Emulation System for Realistic Three-dimensional (3-D) Forest Simulation
[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing , 2017 , 10 (11 ): 4834 -4843 .
[本文引用: 1]
[29]
Xie D Wang P Liu R et al Research on PAR and FPAR of Crop Canopies based on RGM
[C]∥2010 IEEE International Geoscience and Remote Sensing Symposium ,2010 :1493 -1496 .
[本文引用: 1]
Light Scattering By Leaf Layers With Application To Canopy Reflectance Modeling: the SAIL model
1
1984
... 在植被定量遥感中,辐射传输建模是理解冠层与太阳辐射之间相互作用机制以及从遥感信号反演植被参数的重要基础.然而由于地物的复杂性,难以建立起遥感信号与植被参数之间的简单数学关系,因此传统遥感模型往往对地物的结构特征进行简化和抽象描述.例如,将植被冠层简化为水平均匀分布的叶片,从而发展了一系列的一维辐射传输模型[1 -2 ] ;或者将树冠抽象为简单的几何体而发展了几何光学模型[3 -4 ] .但是,这些模型往往难以描述精细的植被结构,因此近年来能够准确描述空间异质性的三维辐射传输模型受到了越来越多的重视. ...
An Integrated Model of Soil-Canopy Spectral Radiances, Photosynthesis, Fluorescence, Temperature and Energy Balance
1
2009
... 在植被定量遥感中,辐射传输建模是理解冠层与太阳辐射之间相互作用机制以及从遥感信号反演植被参数的重要基础.然而由于地物的复杂性,难以建立起遥感信号与植被参数之间的简单数学关系,因此传统遥感模型往往对地物的结构特征进行简化和抽象描述.例如,将植被冠层简化为水平均匀分布的叶片,从而发展了一系列的一维辐射传输模型[1 -2 ] ;或者将树冠抽象为简单的几何体而发展了几何光学模型[3 -4 ] .但是,这些模型往往难以描述精细的植被结构,因此近年来能够准确描述空间异质性的三维辐射传输模型受到了越来越多的重视. ...
Geometric-Optical Bidirectional Reflectance Modeling of a Conifer Forest Canopy
1
1986
... 在植被定量遥感中,辐射传输建模是理解冠层与太阳辐射之间相互作用机制以及从遥感信号反演植被参数的重要基础.然而由于地物的复杂性,难以建立起遥感信号与植被参数之间的简单数学关系,因此传统遥感模型往往对地物的结构特征进行简化和抽象描述.例如,将植被冠层简化为水平均匀分布的叶片,从而发展了一系列的一维辐射传输模型[1 -2 ] ;或者将树冠抽象为简单的几何体而发展了几何光学模型[3 -4 ] .但是,这些模型往往难以描述精细的植被结构,因此近年来能够准确描述空间异质性的三维辐射传输模型受到了越来越多的重视. ...
An Analytical Hybrid Gort Model for Bidirectional Reflectance over Discontinuous Plant Canopies
1
1999
... 在植被定量遥感中,辐射传输建模是理解冠层与太阳辐射之间相互作用机制以及从遥感信号反演植被参数的重要基础.然而由于地物的复杂性,难以建立起遥感信号与植被参数之间的简单数学关系,因此传统遥感模型往往对地物的结构特征进行简化和抽象描述.例如,将植被冠层简化为水平均匀分布的叶片,从而发展了一系列的一维辐射传输模型[1 -2 ] ;或者将树冠抽象为简单的几何体而发展了几何光学模型[3 -4 ] .但是,这些模型往往难以描述精细的植被结构,因此近年来能够准确描述空间异质性的三维辐射传输模型受到了越来越多的重视. ...
Fusion of Imaging Spectrometer and Lidar Data over Combined Radiative Transfer Models For Forest Canopy Characterization
1
2007
... 此外,随着高分辨率三维数据(例如激光雷达数据)的丰富,如何充分利用这些信息并与辐射传输理论相结合来反演更高精度的地表参量成为定量遥感研究中的一个新问题,并且已得到国内外相关学者的关注[5 -6 ] .由于三维辐射传输模型可以描述任意复杂的场景结构,能够更大限度地利用多源遥感数据所提供的信息量,因此三维辐射传输模型正是解决这一问题的理想工具. ...
Estimation of Forest Leaf Water Content through Inversion of A Radiative Transfer Model from Lidar And Hyperspectral Data
1
2019
... 此外,随着高分辨率三维数据(例如激光雷达数据)的丰富,如何充分利用这些信息并与辐射传输理论相结合来反演更高精度的地表参量成为定量遥感研究中的一个新问题,并且已得到国内外相关学者的关注[5 -6 ] .由于三维辐射传输模型可以描述任意复杂的场景结构,能够更大限度地利用多源遥感数据所提供的信息量,因此三维辐射传输模型正是解决这一问题的理想工具. ...
3-D Scene Modeling of Semidesert Vegetation Cover And Its Radiation Regime
1
2000
... 在过去20多年中,遥感领域已经发展了一系列的三维辐射传输模型,例如基于辐射度算法的RGM模型[7 ] 和RAPID模型[8 ] 、基于光线追踪的Raytran模型[9 ] 以及基于离散坐标法的DART模型[10 ] 等.从现有模型来看,光线追踪算法由于其良好的扩展性,在三维辐射传输模型中使用的频率更高,并且已经得到了较多的应用[11 -12 ] ,但光线追踪算法本身又有多种实现方式,从而也导致了各个模型之间存在显著的差异. ...
RAPID: A Radiosity Applicable to Porous Individual Objects for Directional Reflectance over Complex Vegetated Scenes
1
2013
... 在过去20多年中,遥感领域已经发展了一系列的三维辐射传输模型,例如基于辐射度算法的RGM模型[7 ] 和RAPID模型[8 ] 、基于光线追踪的Raytran模型[9 ] 以及基于离散坐标法的DART模型[10 ] 等.从现有模型来看,光线追踪算法由于其良好的扩展性,在三维辐射传输模型中使用的频率更高,并且已经得到了较多的应用[11 -12 ] ,但光线追踪算法本身又有多种实现方式,从而也导致了各个模型之间存在显著的差异. ...
Raytran: A Monte Carlo Ray-Tracing Model to Compute Light Scattering in Three-Dimensional Heterogeneous Media
1
1998
... 在过去20多年中,遥感领域已经发展了一系列的三维辐射传输模型,例如基于辐射度算法的RGM模型[7 ] 和RAPID模型[8 ] 、基于光线追踪的Raytran模型[9 ] 以及基于离散坐标法的DART模型[10 ] 等.从现有模型来看,光线追踪算法由于其良好的扩展性,在三维辐射传输模型中使用的频率更高,并且已经得到了较多的应用[11 -12 ] ,但光线追踪算法本身又有多种实现方式,从而也导致了各个模型之间存在显著的差异. ...
DART: A 3D Model for Simulating Satellite Images and Studying Surface Radiation Budget
1
2004
... 在过去20多年中,遥感领域已经发展了一系列的三维辐射传输模型,例如基于辐射度算法的RGM模型[7 ] 和RAPID模型[8 ] 、基于光线追踪的Raytran模型[9 ] 以及基于离散坐标法的DART模型[10 ] 等.从现有模型来看,光线追踪算法由于其良好的扩展性,在三维辐射传输模型中使用的频率更高,并且已经得到了较多的应用[11 -12 ] ,但光线追踪算法本身又有多种实现方式,从而也导致了各个模型之间存在显著的差异. ...
林木冠层光合有效辐射分布模拟的研究
1
2008
... 在过去20多年中,遥感领域已经发展了一系列的三维辐射传输模型,例如基于辐射度算法的RGM模型[7 ] 和RAPID模型[8 ] 、基于光线追踪的Raytran模型[9 ] 以及基于离散坐标法的DART模型[10 ] 等.从现有模型来看,光线追踪算法由于其良好的扩展性,在三维辐射传输模型中使用的频率更高,并且已经得到了较多的应用[11 -12 ] ,但光线追踪算法本身又有多种实现方式,从而也导致了各个模型之间存在显著的差异. ...
林木冠层光合有效辐射分布模拟的研究
1
2008
... 在过去20多年中,遥感领域已经发展了一系列的三维辐射传输模型,例如基于辐射度算法的RGM模型[7 ] 和RAPID模型[8 ] 、基于光线追踪的Raytran模型[9 ] 以及基于离散坐标法的DART模型[10 ] 等.从现有模型来看,光线追踪算法由于其良好的扩展性,在三维辐射传输模型中使用的频率更高,并且已经得到了较多的应用[11 -12 ] ,但光线追踪算法本身又有多种实现方式,从而也导致了各个模型之间存在显著的差异. ...
基于蒙特卡罗光线跟踪方法的植物三维冠层辐射传输模型
1
2005
... 在过去20多年中,遥感领域已经发展了一系列的三维辐射传输模型,例如基于辐射度算法的RGM模型[7 ] 和RAPID模型[8 ] 、基于光线追踪的Raytran模型[9 ] 以及基于离散坐标法的DART模型[10 ] 等.从现有模型来看,光线追踪算法由于其良好的扩展性,在三维辐射传输模型中使用的频率更高,并且已经得到了较多的应用[11 -12 ] ,但光线追踪算法本身又有多种实现方式,从而也导致了各个模型之间存在显著的差异. ...
基于蒙特卡罗光线跟踪方法的植物三维冠层辐射传输模型
1
2005
... 在过去20多年中,遥感领域已经发展了一系列的三维辐射传输模型,例如基于辐射度算法的RGM模型[7 ] 和RAPID模型[8 ] 、基于光线追踪的Raytran模型[9 ] 以及基于离散坐标法的DART模型[10 ] 等.从现有模型来看,光线追踪算法由于其良好的扩展性,在三维辐射传输模型中使用的频率更高,并且已经得到了较多的应用[11 -12 ] ,但光线追踪算法本身又有多种实现方式,从而也导致了各个模型之间存在显著的差异. ...
Three-dimensional Forest Light Interaction Model Using a Monte Carlo Method
1
1996
... 根据发射光线起点的不同,光线追踪算法可分为前向光线追踪和后向光线追踪.前向光线追踪从光源发射光线,并跟踪光线在场景中的传播过程,从而模拟所需的遥感信号,典型的模型有Raytran、FLIGHT[13 ] 、FLiES[14 ] 、Rayspread[15 ] 以及FluorWPS[16 ] 等.Raytran模型从光源发射单色光,根据场景元素的光学属性决定光线是否被吸收或者被散射,最终通过统计逃逸出场景的光线数量以及光线所携带的能量来估算反射率.虽然Raytran模型这种实现方式简单,但是计算效率较低,且难以同时模拟多波段的反射信号.为了解决Raytran模型的效率问题,Widlowski等[15 ] 在Raytran的基础上发展了Rayspread模型,通过在每个光线碰撞点处向观测方向发射“子光线”(secondary rays)来估算反射率,提高了计算效率和精度.利用同样的原理,Zhao等[17 ] 提出了进一步考虑权重变化、可进行高光谱和荧光信号辐射模拟的Weighted Photon Spread (WPS)模型和FluorWPS模型.后向光线追踪从传感器发射光线,并计算辐射源沿该光线传播到传感器的辐亮度值.后向光线追踪的主要优势在于只计算了恰好进入传感器部分的能量,因此在模拟影像方面具有较大的优势,但是难以计算能量平衡问题.典型的后向光线追踪模型是DIRSIG模型[18 ] ,由于后向光线追踪的特点,该模型尤其适合于研究传感器参数对遥感信号的影响,是辅助传感器设计的有力工具,但是该模型的主要问题是难以共享使用.因此,能够同时进行前向光线追踪和后向光线追踪以应对不同的模拟需求则显得尤其重要,同时也是现有模型所欠缺的功能. ...
A Coupled 1-D Atmosphere and 3-D Canopy Radiative Transfer Model for Canopy Reflectance, Light Environment, and Photosynthesis Simulation in A Heterogeneous Landscape
1
2008
... 根据发射光线起点的不同,光线追踪算法可分为前向光线追踪和后向光线追踪.前向光线追踪从光源发射光线,并跟踪光线在场景中的传播过程,从而模拟所需的遥感信号,典型的模型有Raytran、FLIGHT[13 ] 、FLiES[14 ] 、Rayspread[15 ] 以及FluorWPS[16 ] 等.Raytran模型从光源发射单色光,根据场景元素的光学属性决定光线是否被吸收或者被散射,最终通过统计逃逸出场景的光线数量以及光线所携带的能量来估算反射率.虽然Raytran模型这种实现方式简单,但是计算效率较低,且难以同时模拟多波段的反射信号.为了解决Raytran模型的效率问题,Widlowski等[15 ] 在Raytran的基础上发展了Rayspread模型,通过在每个光线碰撞点处向观测方向发射“子光线”(secondary rays)来估算反射率,提高了计算效率和精度.利用同样的原理,Zhao等[17 ] 提出了进一步考虑权重变化、可进行高光谱和荧光信号辐射模拟的Weighted Photon Spread (WPS)模型和FluorWPS模型.后向光线追踪从传感器发射光线,并计算辐射源沿该光线传播到传感器的辐亮度值.后向光线追踪的主要优势在于只计算了恰好进入传感器部分的能量,因此在模拟影像方面具有较大的优势,但是难以计算能量平衡问题.典型的后向光线追踪模型是DIRSIG模型[18 ] ,由于后向光线追踪的特点,该模型尤其适合于研究传感器参数对遥感信号的影响,是辅助传感器设计的有力工具,但是该模型的主要问题是难以共享使用.因此,能够同时进行前向光线追踪和后向光线追踪以应对不同的模拟需求则显得尤其重要,同时也是现有模型所欠缺的功能. ...
Rayspread: A Virtual Laboratory for Rapid BRF Simulations over 3-D Plant Canopies
2
2006
... 根据发射光线起点的不同,光线追踪算法可分为前向光线追踪和后向光线追踪.前向光线追踪从光源发射光线,并跟踪光线在场景中的传播过程,从而模拟所需的遥感信号,典型的模型有Raytran、FLIGHT[13 ] 、FLiES[14 ] 、Rayspread[15 ] 以及FluorWPS[16 ] 等.Raytran模型从光源发射单色光,根据场景元素的光学属性决定光线是否被吸收或者被散射,最终通过统计逃逸出场景的光线数量以及光线所携带的能量来估算反射率.虽然Raytran模型这种实现方式简单,但是计算效率较低,且难以同时模拟多波段的反射信号.为了解决Raytran模型的效率问题,Widlowski等[15 ] 在Raytran的基础上发展了Rayspread模型,通过在每个光线碰撞点处向观测方向发射“子光线”(secondary rays)来估算反射率,提高了计算效率和精度.利用同样的原理,Zhao等[17 ] 提出了进一步考虑权重变化、可进行高光谱和荧光信号辐射模拟的Weighted Photon Spread (WPS)模型和FluorWPS模型.后向光线追踪从传感器发射光线,并计算辐射源沿该光线传播到传感器的辐亮度值.后向光线追踪的主要优势在于只计算了恰好进入传感器部分的能量,因此在模拟影像方面具有较大的优势,但是难以计算能量平衡问题.典型的后向光线追踪模型是DIRSIG模型[18 ] ,由于后向光线追踪的特点,该模型尤其适合于研究传感器参数对遥感信号的影响,是辅助传感器设计的有力工具,但是该模型的主要问题是难以共享使用.因此,能够同时进行前向光线追踪和后向光线追踪以应对不同的模拟需求则显得尤其重要,同时也是现有模型所欠缺的功能. ...
... [15 ]在Raytran的基础上发展了Rayspread模型,通过在每个光线碰撞点处向观测方向发射“子光线”(secondary rays)来估算反射率,提高了计算效率和精度.利用同样的原理,Zhao等[17 ] 提出了进一步考虑权重变化、可进行高光谱和荧光信号辐射模拟的Weighted Photon Spread (WPS)模型和FluorWPS模型.后向光线追踪从传感器发射光线,并计算辐射源沿该光线传播到传感器的辐亮度值.后向光线追踪的主要优势在于只计算了恰好进入传感器部分的能量,因此在模拟影像方面具有较大的优势,但是难以计算能量平衡问题.典型的后向光线追踪模型是DIRSIG模型[18 ] ,由于后向光线追踪的特点,该模型尤其适合于研究传感器参数对遥感信号的影响,是辅助传感器设计的有力工具,但是该模型的主要问题是难以共享使用.因此,能够同时进行前向光线追踪和后向光线追踪以应对不同的模拟需求则显得尤其重要,同时也是现有模型所欠缺的功能. ...
FluorWPS: A Monte Carlo Ray-tracing Model to Compute Sun-Induced Chlorophyll Fluorescence of Three-dimensional Canopy
1
2016
... 根据发射光线起点的不同,光线追踪算法可分为前向光线追踪和后向光线追踪.前向光线追踪从光源发射光线,并跟踪光线在场景中的传播过程,从而模拟所需的遥感信号,典型的模型有Raytran、FLIGHT[13 ] 、FLiES[14 ] 、Rayspread[15 ] 以及FluorWPS[16 ] 等.Raytran模型从光源发射单色光,根据场景元素的光学属性决定光线是否被吸收或者被散射,最终通过统计逃逸出场景的光线数量以及光线所携带的能量来估算反射率.虽然Raytran模型这种实现方式简单,但是计算效率较低,且难以同时模拟多波段的反射信号.为了解决Raytran模型的效率问题,Widlowski等[15 ] 在Raytran的基础上发展了Rayspread模型,通过在每个光线碰撞点处向观测方向发射“子光线”(secondary rays)来估算反射率,提高了计算效率和精度.利用同样的原理,Zhao等[17 ] 提出了进一步考虑权重变化、可进行高光谱和荧光信号辐射模拟的Weighted Photon Spread (WPS)模型和FluorWPS模型.后向光线追踪从传感器发射光线,并计算辐射源沿该光线传播到传感器的辐亮度值.后向光线追踪的主要优势在于只计算了恰好进入传感器部分的能量,因此在模拟影像方面具有较大的优势,但是难以计算能量平衡问题.典型的后向光线追踪模型是DIRSIG模型[18 ] ,由于后向光线追踪的特点,该模型尤其适合于研究传感器参数对遥感信号的影响,是辅助传感器设计的有力工具,但是该模型的主要问题是难以共享使用.因此,能够同时进行前向光线追踪和后向光线追踪以应对不同的模拟需求则显得尤其重要,同时也是现有模型所欠缺的功能. ...
Monte Carlo Ray Tracing in Optical Canopy Reflectance Modelling
1
2000
... 根据发射光线起点的不同,光线追踪算法可分为前向光线追踪和后向光线追踪.前向光线追踪从光源发射光线,并跟踪光线在场景中的传播过程,从而模拟所需的遥感信号,典型的模型有Raytran、FLIGHT[13 ] 、FLiES[14 ] 、Rayspread[15 ] 以及FluorWPS[16 ] 等.Raytran模型从光源发射单色光,根据场景元素的光学属性决定光线是否被吸收或者被散射,最终通过统计逃逸出场景的光线数量以及光线所携带的能量来估算反射率.虽然Raytran模型这种实现方式简单,但是计算效率较低,且难以同时模拟多波段的反射信号.为了解决Raytran模型的效率问题,Widlowski等[15 ] 在Raytran的基础上发展了Rayspread模型,通过在每个光线碰撞点处向观测方向发射“子光线”(secondary rays)来估算反射率,提高了计算效率和精度.利用同样的原理,Zhao等[17 ] 提出了进一步考虑权重变化、可进行高光谱和荧光信号辐射模拟的Weighted Photon Spread (WPS)模型和FluorWPS模型.后向光线追踪从传感器发射光线,并计算辐射源沿该光线传播到传感器的辐亮度值.后向光线追踪的主要优势在于只计算了恰好进入传感器部分的能量,因此在模拟影像方面具有较大的优势,但是难以计算能量平衡问题.典型的后向光线追踪模型是DIRSIG模型[18 ] ,由于后向光线追踪的特点,该模型尤其适合于研究传感器参数对遥感信号的影响,是辅助传感器设计的有力工具,但是该模型的主要问题是难以共享使用.因此,能够同时进行前向光线追踪和后向光线追踪以应对不同的模拟需求则显得尤其重要,同时也是现有模型所欠缺的功能. ...
Dirsig5: Core Design and Implementation
1
2012
... 根据发射光线起点的不同,光线追踪算法可分为前向光线追踪和后向光线追踪.前向光线追踪从光源发射光线,并跟踪光线在场景中的传播过程,从而模拟所需的遥感信号,典型的模型有Raytran、FLIGHT[13 ] 、FLiES[14 ] 、Rayspread[15 ] 以及FluorWPS[16 ] 等.Raytran模型从光源发射单色光,根据场景元素的光学属性决定光线是否被吸收或者被散射,最终通过统计逃逸出场景的光线数量以及光线所携带的能量来估算反射率.虽然Raytran模型这种实现方式简单,但是计算效率较低,且难以同时模拟多波段的反射信号.为了解决Raytran模型的效率问题,Widlowski等[15 ] 在Raytran的基础上发展了Rayspread模型,通过在每个光线碰撞点处向观测方向发射“子光线”(secondary rays)来估算反射率,提高了计算效率和精度.利用同样的原理,Zhao等[17 ] 提出了进一步考虑权重变化、可进行高光谱和荧光信号辐射模拟的Weighted Photon Spread (WPS)模型和FluorWPS模型.后向光线追踪从传感器发射光线,并计算辐射源沿该光线传播到传感器的辐亮度值.后向光线追踪的主要优势在于只计算了恰好进入传感器部分的能量,因此在模拟影像方面具有较大的优势,但是难以计算能量平衡问题.典型的后向光线追踪模型是DIRSIG模型[18 ] ,由于后向光线追踪的特点,该模型尤其适合于研究传感器参数对遥感信号的影响,是辅助传感器设计的有力工具,但是该模型的主要问题是难以共享使用.因此,能够同时进行前向光线追踪和后向光线追踪以应对不同的模拟需求则显得尤其重要,同时也是现有模型所欠缺的功能. ...
1
2016
... 近年来,光线追踪技术在计算机图形学领域内得到了长足的发展,涌现了一批高效率的物理渲染引擎,这些引擎能够从虚拟的三维场景中渲染逼真的图像,例如LuxCoreRender(https://luxcorerender.org/ )、PBRT[19 ] 以及POV-Ray[20 ] 等.这些渲染引擎充分地使用了最新的加速计算技术(例如GPU),极大地提高了场景的渲染效率.然而直接将这些渲染引擎应用于遥感信号的模拟并不是一件容易的工作,其主要原因在于这类渲染引擎主要关注图像的逼真程度,而不是物理量的准确性.部分模型只能模拟RGB 3个宽波段,而无法模拟遥感场景的多光谱或者高光谱影像.因此,在这些引擎基础上进行修改或者利用这些引擎提供的加速结构重新实现遥感信号的模拟是一个更为可行的方案.例如,Auer等[21 ] 基于POV-Ray开发了三维场景的SAR信号模拟器;DIRSIG模型最近对其核心部分进行了重构,以利用最新的图形学技术加速其计算过程[22 ] ;DART模型在其核心部分集成了Intel公司开发的Embree光线追踪库,其计算效率得到了较大的提升. ...
POV Ray: Persistence of Vision Parallel Raytracer
1
1998
... 近年来,光线追踪技术在计算机图形学领域内得到了长足的发展,涌现了一批高效率的物理渲染引擎,这些引擎能够从虚拟的三维场景中渲染逼真的图像,例如LuxCoreRender(https://luxcorerender.org/ )、PBRT[19 ] 以及POV-Ray[20 ] 等.这些渲染引擎充分地使用了最新的加速计算技术(例如GPU),极大地提高了场景的渲染效率.然而直接将这些渲染引擎应用于遥感信号的模拟并不是一件容易的工作,其主要原因在于这类渲染引擎主要关注图像的逼真程度,而不是物理量的准确性.部分模型只能模拟RGB 3个宽波段,而无法模拟遥感场景的多光谱或者高光谱影像.因此,在这些引擎基础上进行修改或者利用这些引擎提供的加速结构重新实现遥感信号的模拟是一个更为可行的方案.例如,Auer等[21 ] 基于POV-Ray开发了三维场景的SAR信号模拟器;DIRSIG模型最近对其核心部分进行了重构,以利用最新的图形学技术加速其计算过程[22 ] ;DART模型在其核心部分集成了Intel公司开发的Embree光线追踪库,其计算效率得到了较大的提升. ...
Ray-tracing Simulation Techniques for Understanding High-resolution SAR Images
1
2010
... 近年来,光线追踪技术在计算机图形学领域内得到了长足的发展,涌现了一批高效率的物理渲染引擎,这些引擎能够从虚拟的三维场景中渲染逼真的图像,例如LuxCoreRender(https://luxcorerender.org/ )、PBRT[19 ] 以及POV-Ray[20 ] 等.这些渲染引擎充分地使用了最新的加速计算技术(例如GPU),极大地提高了场景的渲染效率.然而直接将这些渲染引擎应用于遥感信号的模拟并不是一件容易的工作,其主要原因在于这类渲染引擎主要关注图像的逼真程度,而不是物理量的准确性.部分模型只能模拟RGB 3个宽波段,而无法模拟遥感场景的多光谱或者高光谱影像.因此,在这些引擎基础上进行修改或者利用这些引擎提供的加速结构重新实现遥感信号的模拟是一个更为可行的方案.例如,Auer等[21 ] 基于POV-Ray开发了三维场景的SAR信号模拟器;DIRSIG模型最近对其核心部分进行了重构,以利用最新的图形学技术加速其计算过程[22 ] ;DART模型在其核心部分集成了Intel公司开发的Embree光线追踪库,其计算效率得到了较大的提升. ...
DIRSIG5: Next-generation Remote Sensing Data and Image Simulation Framework
1
2017
... 近年来,光线追踪技术在计算机图形学领域内得到了长足的发展,涌现了一批高效率的物理渲染引擎,这些引擎能够从虚拟的三维场景中渲染逼真的图像,例如LuxCoreRender(https://luxcorerender.org/ )、PBRT[19 ] 以及POV-Ray[20 ] 等.这些渲染引擎充分地使用了最新的加速计算技术(例如GPU),极大地提高了场景的渲染效率.然而直接将这些渲染引擎应用于遥感信号的模拟并不是一件容易的工作,其主要原因在于这类渲染引擎主要关注图像的逼真程度,而不是物理量的准确性.部分模型只能模拟RGB 3个宽波段,而无法模拟遥感场景的多光谱或者高光谱影像.因此,在这些引擎基础上进行修改或者利用这些引擎提供的加速结构重新实现遥感信号的模拟是一个更为可行的方案.例如,Auer等[21 ] 基于POV-Ray开发了三维场景的SAR信号模拟器;DIRSIG模型最近对其核心部分进行了重构,以利用最新的图形学技术加速其计算过程[22 ] ;DART模型在其核心部分集成了Intel公司开发的Embree光线追踪库,其计算效率得到了较大的提升. ...
Mitsuba Renderer
1
2010
... 基于以上考虑,利用Mitsuba[23 ] 渲染软件所提供的加速框架发展了基于光线追踪算法的三维真实冠层辐射传输模型LESS[24 ] (LargE-Scale Remote Sensing Data and Image Simulation Framework),该模型能够同时进行前向光线追踪以及后向光线追踪,同时充分利用了最新图形学技术以实现更准确和更高效的大场景遥感信号的模拟.本文主要介绍了LESS的基本原理、主要功能以及典型的应用案例,为利用LESS模型进行定量遥感建模研究提供参考. ...
LESS: Large-Scale Remote Sensing Data and Image Simulation Framework over Heterogeneous 3D Scenes
1
2019
... 基于以上考虑,利用Mitsuba[23 ] 渲染软件所提供的加速框架发展了基于光线追踪算法的三维真实冠层辐射传输模型LESS[24 ] (LargE-Scale Remote Sensing Data and Image Simulation Framework),该模型能够同时进行前向光线追踪以及后向光线追踪,同时充分利用了最新图形学技术以实现更准确和更高效的大场景遥感信号的模拟.本文主要介绍了LESS的基本原理、主要功能以及典型的应用案例,为利用LESS模型进行定量遥感建模研究提供参考. ...
Two Models for Rapidly Calculating Bidirectional Reflectance of Complex Vegetation Scenes: Photon Spread (PS) Model And Statistical Photon Spread (Sps) Model
1
1998
... 式中:I v A v W ∙ s r - 1 θ v [25 ] . ...
Robust Monte Carlo Methods for Light Transport Simulation
1
1997
... 上述过程相当于对光源进行了采样,要计算入射光线经过q q q p b s d f a t m = c o s θ a t m π p b s d f s u n = c o s θ s u n π [26 ] ,它们的组合概率为: ...
Simulating Imaging Spectrometer Data: 3D Forest Modeling based on Lidar and In Situ Data
1
2014
... 从激光雷达获取三维结构信息并结合光谱信息模拟遥感信号是目前三维辐射传输模型的应用方向之一,因为激光雷达提供了前所未有的精细结构信息,这些信息正是三维辐射传输模型所必需的.通常而言,从激光雷达数据重建三维虚拟森林场景有两种方式,一是基于体元的方法[27 ] ,二是基于单木的方法[28 ] .本节主要介绍基于单木重建场景并进行遥感影像模拟的方法. ...
A Large-scale Emulation System for Realistic Three-dimensional (3-D) Forest Simulation
1
2017
... 从激光雷达获取三维结构信息并结合光谱信息模拟遥感信号是目前三维辐射传输模型的应用方向之一,因为激光雷达提供了前所未有的精细结构信息,这些信息正是三维辐射传输模型所必需的.通常而言,从激光雷达数据重建三维虚拟森林场景有两种方式,一是基于体元的方法[27 ] ,二是基于单木的方法[28 ] .本节主要介绍基于单木重建场景并进行遥感影像模拟的方法. ...
Research on PAR and FPAR of Crop Canopies based on RGM
1
2010
... LESS模型可以模拟冠层分层FPAR,用于验证其他物理模型或者发展参数化反演模型.此处选择了实测的冬小麦和夏玉米FPAR数据集[29 ] 对LESS的FPAR模拟结果进行了对比和分析.该数据集获取于北京市昌平区小汤山国家农业精准实验基地,数据获取时间为2008年4月27日(冬小麦)和2010年8月29日(夏玉米),其中夏玉米包含两个播种期的植株:处于喇叭口期的夏玉米-I以及处于拔节期的夏玉米-II.冬小麦和夏玉米的参数(株高、垄距、光谱以及LAI等)通过实测获得.冬小麦选择了3个样点,分别沿顺垄方向(PZ8-S)和垂直垄方向(PZ8-C)各测量了一次,夏玉米选择了1个样点,同样地,在该样点处沿顺垄方向(JD28-I-S和JD28-I-S)和垂直垄方向(JD28-II-S和JD28-II-S)分别测量了1次.在每个测量样点,利用SUNSCAN冠层分析仪从冠层顶部到底部每隔16 cm(冬小麦)/20 cm(夏玉米)向上及向下各测了1次上行和下行PAR,从而得到不同高度处的FPAR. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}