1 引 言
水体中叶绿素a浓度是反映水体富营养化程度、监测藻华爆发情况的重要指标,对其进行有效监测,有助于防止水质进一步恶化[1 ,2 ] 。传统方法一般在实验室内使用分光光度法测量叶绿素a浓度,需要耗费一定的时间和人力,且采样点有限,测量过程涉及水样采集、运输、过滤、研磨及提取等,这一系列限制因素和繁复的过程使得人们难以快速评估水体叶绿素a浓度水平[3 ,4 ] 。相比之下,近几十年兴起的遥感手段能够在较短时间内反演出更大尺度范围的叶绿素a浓度,进而监测藻华爆发情况[5 ] ,对建设环境友好型社会具有重要意义。
早期利用遥感手段反演叶绿素a浓度主要围绕大洋等Ⅰ类水体展开,一般基于蓝绿波段比值,已取得较好的效果,但此类算法在光学活性组分作用机制复杂的Ⅱ类水体中应用受限[6 ] 。因此,发展出了一系列更适用于Ⅱ类水体的算法,算法特征波段选取也有所改变,主要涉及叶绿素荧光峰以及其他近红外光和红光处的敏感波段。大部分反演算法虽在实验区表现较好,但通常受区域和季节因素限制大,难以广泛推广,同时,特征波段的位置和算法的具体参数值随水体变化而变化[4 ] ,少数适应性相对较好的算法也有待进一步验证。
在基于遥感技术反演水体叶绿素a浓度算法快速发展的背景下,旨在总结40 a来应用较广或具有创新性的水体叶绿素a浓度反演算法,并对这些算法进行适应性和优劣势分析,以期为后续研究活动提供一定的依据和指导。根据算法结构设计的不同,将叶绿素a浓度反演算法分为:①基于叶绿素a特征荧光峰或反射峰的算法;②基于蓝绿波段组合或近红外-红光波段组合的波段算法;③基于其他波段组合,针对不同水体特性提出的各类新型指数法;④基于人工神经网络、支持向量机等的智能算法;⑤基于水体分类的算法体系;⑥分析类算法。同时,对各类算法进行适应性分析,包括其适用的叶绿素a浓度区间、水体类型、卫星传感器以及优缺点等,进而对后续研究提供算法选择依据。最后,针对目前水体叶绿素a浓度反演中存在的问题进行讨论,并展望未来该研究领域中面临的挑战与机遇。
2 水体叶绿素a浓度遥感反演原理和数据源
2.1 遥感反演原理
利用遥感手段反演水体叶绿素a浓度属于水色遥感的一大重要组成部分,水色即水体颜色,由光源光谱和水体吸收及散射作用共同决定,影响水体颜色的水体要素包括浮游植物色素,无机悬浮物和有色可溶性有机物(黄色物质)等。水色遥感的理论基础为:水体光学组分浓度发生变化将引起水体光学性质(如吸收和散射特性)的变化,进而引起离水反射率的变化;在已知入射光源光谱的前提下,通过获取水体反射光谱,分析水体各组分的吸收和散射作用,能够提取出水体各组分的浓度信息。以太阳为入射光源,图1 展示了传感器接收水体及大气辐射信息的过程。
图1
图1
卫星传感器接收水体及大气辐射信息示意图
Fig.1
A schematic diagram of radiance received by the sensor above the water
水体叶绿素a浓度的遥感反演算法包括分析类算法和经验类算法。基于辐射传输方程的算法,一般归为分析/半分析算法,其中半分析算法引入了经验关系;而基于统计学方法的算法,一般归为经验/半经验算法,其中半经验算法涉及了光谱特征分析。前者具有明确的物理意义而后者相对简单,易于实现。
利用分析类方法对水体叶绿素a浓度进行反演,一般是基于水面遥感反射率R r s λ R r s λ a 和散射系数b 等的固有光学量(IOPs)。水体辐射方程揭示了水体表观光学量和固有光学量之间的关系,经简化后得到生物光学模型,广泛应用于水色遥感领域[7 ] :
R ( 0 - , λ ) = f b b λ a λ + b b λ (1)
其中:R ( 0 - , λ ) f b b λ a λ
此外,部分算法不能由辐射传输方程推导得到,主要利用统计学方法,辅以光谱特征分析,选择敏感波段或波段组合,与实地测量的叶绿素a浓度建立统计关系,该类方法被归为经验法或半经验法。在Ⅰ类水体中,随着叶绿素a浓度升高,蓝光处浮游植物吸收增大,绿光处浮游植物粒子散射增大,故导致蓝绿光处反射率比值降低,蓝绿波段比值常作为该类水体中的敏感波段组合;在Ⅱ类水体中,常用的敏感波段包括685 nm附近的太阳激发的叶绿素荧光峰(SICF),560 nm附近由浮游植物弱吸收、细胞壁散射和无机悬浮物散射等导致的反射峰以及675 nm处因叶绿素a强吸收作用形成的反射谷,在具体水体中,波段位置可能有所改变。
2.2 遥感反演数据源
水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] 。国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据。利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用。各星载传感器的分辨率如表1 所示。
在上述星载遥感数据源中,CZCS、SeaWiFS、MODIS、MERIS和VIIRS主要用于海洋叶绿素a浓度反演,近期MODIS和MERIS在沿岸及内陆水体叶绿素a反演取得了一定的进展,为陆地生态系统设计的Landsat 8 OLI也被用于内陆水体叶绿素a浓度反演。为及时监测有害藻华的爆发,星载传感器需要有较高的时间分辨率和光谱分辨率。然而,星载传感器的空间分辨率和光谱分辨率存在相互制约的关系,给内陆水体叶绿素a反演带来了挑战。内陆小型水体对传感器空间分辨率要求高,但高空间分辨率的传感器通常瞬时视场角(IFOV)小,为满足成像信噪比要求,就需要增加光谱带宽,最终导致传感器光谱分辨率降低[35 ] 。如表1 所示,时间分辨率和光谱分辨率较高的传感器,空间分辨率较低,如MODIS,VIIRS,GOCI等;而其中光谱分辨率和空间分辨率都较高的Hyperion的时间分辨率较低,为16 d。由此可见,针对不同类型的水体,选取合适的星载数据源,并进一步寻求分辨率之间的平衡与优化十分重要。
3 各种叶绿素a浓度的反演算法及其特征分析
3.1 荧光峰/反射峰算法
叶绿素a的荧光信号是其区别于黄色物质和悬浮物的主要特征之一[36 ] 。1977年Neville与Gower[37 ] 使用机载光谱仪,确定了叶绿素a荧光信号出现在685 nm处左右,并指出基于荧光信号反演叶绿素a浓度的可能性。后续学者发展出了一系列基于叶绿素a荧光信号的反演方法,包括荧光基线高度法及其变体(FLH、FLH Blue、FLH Violet)、归一化荧光高度法(NFH)、荧光包络面积法(FEA)等。除此之外,也有学者基于荧光峰算法的算法结构,提出了改进后的反射峰算法(MPH、MCI),反射峰指的是叶绿素a在红光—近红外波段的反射率曲线波峰,不仅包含了荧光峰信号,还包含了藻类细胞散射信号[38 ] 。
3.1.1 荧光基线高度法
荧光基线高度法最早由Gower[39 ] 提出,经抛物线拟合,计算出685 nm左右处荧光信号高于两侧连线(即基线)的高度,即荧光基线高度(FLH)。后Gower等[40 ] 又使用MERIS波段计算FLH,如式(2)所示,通过经验校准,寻找FLH与叶绿素a浓度之间的关系来对其浓度进行反演,此法的适用范围取决于水体内其他光学活跃组分的浓度,常用于近岸水体[41 ] ,在此类水体中,蓝绿波段比值法常因高浓度的黄色物质和悬浮物的存在导致算法的精度受到影响。Landsat 8的波段配置使其对叶绿素a的特征波峰不太敏感,导致很多反演算法在Landsat 8中的应用受到一定限制[11 ] 。为此,Beck等[28 ] 结合前人开发的多种算法,提出了基于绿光处波峰的FLH Blue和FLH Violet两种算法,结果表明,绿光波峰的FLH Violet算法与Landsat 8融合相对较好(R 2 为0.546)。
F L H = L 2 - L 1 - ( L 3 - L 1 ) ( λ 2 - λ 1 ) ( λ 3 - λ 1 ) (2)
其中:Li (i =1,2,3) 为MERIS波段i 处的离水辐亮度,λ i
3.1.2 归一化荧光高度法
Vos等[42 ] 指出叶绿素a在700 nm附近的荧光峰位置及高度,常随叶绿素a浓度的变化而变化。定量研究叶绿素a浓度变化与荧光峰高度之间关系的方法除了上文提到的荧光基线高度法,还有归一化荧光高度法[43 -44 ] 。归一化荧光高度法(NFH)的基本原理是将荧光峰处局部反射率最大值R m a x R 560 R 675 式(3)所示,Gitelson[45 ] 使用归一化荧光高度法,对多个富营养化水体中叶绿素a浓度进行反演,相关系数达0.93以上。
N F H = R m a x R 560 或 N F H = R m a x R 675 (3)
3.1.3 荧光包络面积法
由于叶绿素a荧光基线的位置随着叶绿素a浓度的增加存在向长波段偏移的趋势,故荧光峰的位置是不确定的。为弥补这一缺陷,Liu等[30 ] 提出荧光包络面积法(FEA),该方法采用包络线去除法(连续统去除)减少了背景值的影响,同时考虑了荧光基线的高度和位置来计算荧光包络面积,经高光谱实测数据验证,该方法在叶绿素a浓度较高的珠江口的表现较荧光基线法更佳,适用于高叶绿素a浓度,如爆发水华或赤潮的水体,在其他水体中的适用情况有待进一步验证。
3.1.4 反射峰算法
反射峰高度(MPH)最初由Matthews等[46 ] 提出,其基本思想类似于荧光基线高度,但峰值位置不是固定的,而是对比MERIS近红外、红光波段681、709和753 nm处的反射率,取Bottom of Rayleigh反射率最大值;且基线基于的波段位置也不是708和665 nm,而是885和664 nm,如式(4)所示。结果表明,基于这两个波段的反演结果更加稳健。针对不同类型的水体,Matthews等[46 ] 建立了一种基于MPH的非线性四阶方程,如式(5)所示,该方法有效地简化了大气校正过程,适用于由浮游植物主导的内陆及近岸水体。
M P H = R B R m a x - R B R 664 - (4)
R B R 885 - R B R 664 λ m a x - 664 885 - 664
C h l a = 5.24 × 10 9 M P H 4 - 1.95 × 10 8 M P H 3 (5)
+ 2.46 × 10 6 M P H 2 + 4.02 × 10 3 M P H + 1.97
其中:λ m a x R B R m a x R B R 664 R B R 885
反射峰指数MCI是一个类似于MPH的指数,定义为709 nm处的离水反射率最大值,相对两侧波段基线的差,如式(6)所示。Binding等[47 ] 基于北美内陆多个光学组分各异的水体数据,指出在中低浓度叶绿素a水体中,近红外波段的峰值由荧光信号主导,但随着水体富营养化程度增加,荧光信号对近红外波段峰值的贡献减少,故包含荧光峰信号和藻类细胞散射信号的反射峰算法更适用于表面藻华爆发的富营养化水体。
M C I = L 709 - L 681 - L 753 - L 681 709 - 681 753 - 681 (6)
其中:L 709 L 681
3.2 波段算法
波段算法(BDA)最早的体现形式为蓝绿二波段比值法,该方法在大洋等Ⅰ类水体中反演效果较好且进行了业务化推广。但在Ⅱ类水体中悬浮物和黄色物质在蓝绿波段的吸收作用十分明显,掩盖了叶绿素a的信号,蓝绿二波段比值法的应用受到限制,故发展出了更适宜Ⅱ类水体的红光—近红外二波段算法。因红光—近红外二波段算法在高浑浊水体中精度不佳,又衍生出了适用于更高悬浮物和黄色物质浓度的水体的三波段算法,以及进一步消除纯水和悬浮颗粒对反演精度影响的四波段算法。
3.2.1 二波段算法
二波段算法(2BDA)建立的是两个特定波段比值与叶绿素a浓度之间的关系,其中蓝绿波段比值法最早在大洋等一类水域中得到了广泛应用[48 ] 。O’Reilly 等[18 ] 基于大量实测数据集,总结了一系列基于蓝绿波段比值反演叶绿素a浓度的标准算法OCx(Ocean Chlorophyll),叶绿素a的浓度和波段比值呈四阶多项式关系,算法涵盖多种卫星传感器,针对不同传感器的波段配置,选取相应的绿光波段作为分母,并直接选定或比较多个波段后选取波段反射率的最大值作为分子:
l g C h l a = a 0 + ∑ i = 1 4 a i (7)
l g R r s λ b l u e , c y a n o r c y a n / g r e e n R r s λ g r e e n i
其中:R r s λ λ 0 -a4 根据具体传感器取不同的值,比如OC4针对的是SeaWiFS,分子选取443、490和510 nm处反射率的最大值,分母选取555 nm处的反射率。
后O'Reilly和Werdell[49 ] 进一步更新了OCx算法,发展出OC5和OC6算法。就SeaWiFS而言,在比较选取分子处反射率时,额外考虑了紫光412 nm处的反射率。OC5算法的分母保持不变,而OC6算法的分母取的是555 nm和670 nm处反射率的均值。除此之外,该套算法在近期或即将发射的卫星传感器上的应用情况也得到了验证。
相较于蓝绿波段比值算法,红—近红外二波段算法在内陆和近岸水体中表现更好[50 ] 。蓝绿波段比值算法在开阔大洋类水体中应用更广,而在内陆及近岸水体中,蓝绿波段的反射率还受到了CDOM和非藻类颗粒物的影响,故应考虑采用红光和近红外波段,在这两类波段中,吸收光谱受到的上述影响较小[20 ] 。
Moses等[51 ] 将红—近红外二波段算法与MERIS数据相结合,考虑到大气校正的影响,分别选取了708 nm和665 nm处的反射率,建立叶绿素a浓度与MERIS波段7和9反射率比值之间的线性关系,其中斜率和截距由实测数据经验推导得出,算法在其他水域的适用性还有待验证:
C h l a = 61.324 × R r s ( 708 ) R r s ( 665 ) - 37.94 (8)
Gilerson等[50 ] 在Moses等[51 ] 的基础上,使用实测及模拟数据集,进一步分析了反射光谱和水体固有光学量之间的关系,改进了算法形式,并比较了MERIS二、三波段算法和MODIS二波段算法对光学水质参数变化的敏感程度。结果显示,相较于MODIS二波段算法,MERIS二、三波段算法主要受到水体和浮游植物吸收项的影响,对后向散射项和CDOM吸收项比较不敏感,故在低浓度叶绿素水体中的适用性更佳。其中,MERIS二波段半分析算法经简化后,如式(9)所示:
C h l a = 35.75 × R r s ( 708 ) R r s ( 665 ) - 19.30 1.124 (9)
Gurlin等[20 ] 比较了多种叶绿素a反演算法在内陆和近岸水体中的表现。结果表明,形式相对简单的MERIS两波段算法反而在中低浓度叶绿素a(<25 mg/m3 )反演中表现最佳。该算法同样使用了MERIS的波段7和9,但建立的是叶绿素a浓度和波段比值的非线性二项式关系:
C h l a = 25.28 × R r s ( 708 ) R r s ( 665 ) 2 + 14.85 × R r s ( 708 ) R r s ( 665 ) - 15.18 (10)
3.2.2 三波段算法
Dall'Olmo等[52 ] 将陆地植被叶片叶绿素a含量的概念性反演算法[53 ] 调整后,应用到了水体叶绿素a浓度反演,即三波段法(3BDA)的原型:
C h l a = - 28.3 X 2 + 161.0 X + 56.7 (11)
X = R 660 - 670 - 1 - R 720 - 730 - 1 R 740 - 750 (12)
后三波段法由Moses等[51 ] 和杜聪等[54 ] 进一步发展,分别应用于MERIS和Hyperion星载传感器上。相比于二波段法,三波段法将753 nm处的反射率也纳入算法中,该波段的反射率主要受悬浮颗粒物后向散射的影响。三波段法的优势在于,第三波段的引入理论上消除了其他光学活性组分,即SPM(浮游粒子状物质)和CDOM(有色可溶性有机物),对叶绿素a浓度反演的影响。
为消除非色素悬浮物、CDOM和后向散射的影响,三波段的选取需满足如下条件[55 ] :①λ1 应对叶绿素a吸收最敏感,λ2 应对叶绿素a吸收最不敏感(achla (λ2 )<<achla (λ1 ));②在第二波段上,非色素悬浮物(tripton)和CDOM的吸收应近似于第一波段(atripton (λ1 ) ~ atripton (λ2 )且aCDOM (λ1 ) ~ aCDOM (λ2 ));③第三波段处受到叶绿素a、非色素悬浮物和有色可溶性有机物的影响应该最小;第三波段的后向散射系数应与第一、第二波段的值接近(aw (λ3 )>>achla (λ3 )+atr (λ3 )+acdom (λ3 );bb (λ1 )≈bb (λ2 )≈bb (λ3 ))。
同样地,Gurlin等[20 ] 使用了MERIS的波段7、9和10的反射率,根据实测数据进行调整,发展出了三波段法的二项式形式:
C h l a = 315.50 × R r s - 1 665 - R r s - 1 708 R r s 753 2 + 215.95 × R r s - 1 665 - R r s - 1 708 R r s 753 + 25.66 (13)
相较于3.2.1节中提及的MERIS二波段半分析算法,Gilerson等[50 ] 指出,引入753 nm处反射率的MEIRIS三波段法,受到后向散射项和CDOM吸收项的影响更小:
C h l a = 113.36 × R r s - 1 665 - R r s - 1 708 R r s 753 + 16.45 1.124 (14)
Gons[56 ] 提出了与三波段反射率相关的另一种半分析算法,将叶绿素a的浓度与704 nm和672 nm处的反射比以及由776 nm处反射率计算出的后向散射系数bb 联系在一起:
C h l a = R r s ( 704 ) R r s ( 672 ) a w 704 + b b - a w 672 - b b p / a * 672 (15)
其中: a w 704 a w 672 a * 672
后Gons等[57 , 58 ] 进一步将该算法应用到MERIS传感器波段上,波段选取也进行了相应地调整和转换。经波段调整后,使得该方法在高叶绿素a浓度(>100 mg/m3 )水体中的稳定性和准确性优于其他算法。
3.2.3 四波段算法
Le等[6 ] 在三波段算法的基础上,引入第四波段λ 4 R r s λ 3 R r s λ 4 - 1 - R r s λ 3 - 1 - 1 式(16)和式(17)所示。四波段法(4BDA)在水体高度浑浊时,可减少由于近红外波段处悬浮颗粒的吸收和后向散射以及纯水吸收对算法反演效果的影响。在太湖数据集中,四波段算法的反演效果优于三波段算法。
1 R r s λ 1 - 1 R r s λ 2 ÷ 1 R r s λ 4 - 1 R r s λ 3 = a c h l a λ 1 + a w λ 1 - a w λ 2 a w λ 4 - a w λ 3 (16)
C h l a = 0.009 7 × R r s - 1 662 - R r s - 1 693 R r s - 1 740 - R r s - 1 705 - 0.126 8 (17)
其中:a c h l a λ a w λ λ
3.3 指数算法
为解决不同特征水体叶绿素a浓度反演中遇到的问题,如高悬浮物浓度的水体,低叶绿素浓度的海洋等,发展出了一系列波段指数算法。此类方法相较于前两节算法中涉及到的波段组合,引入了其他波段或采用不同组合形式以构成新的波段组合,并将其定义为一种指数。
3.3.1 Hu颜色指数法
Hu等[21 ] 提出了一种针对叶绿素a浓度低于0.25 mg/m3 的海洋(约占全球海洋的78%)经验反演算法,如式(18)所示。该算法建立了颜色指数(CI)和叶绿素a浓度之间的非线性回归关系。CI定义为绿光波段反射率和红蓝光之间线性反射率插值之间的差,相较于传统蓝绿波段比值法,新引入了红光波段,如式(19)所示。该算法经全球实测数据及卫星遥感数据验证,在低浓度叶绿素a水体中,反演精度高于传统OCx算法[18 ] ,且受后向散射系数、仪器噪声和大气校正误差的影响较小,在光学组分各异的水体表现更加稳健。
C I = R r s 555 - R r s 443 + ( 555 - 443 ) 670 - 443 × R r s 670 - R r s 443 (19)
3.3.2 Yang指数法
针对三波段法在高度浑浊水体中适用性较差,而四波段法对当前卫星传感器光谱分辨率要求较高的情况,Yang等[59 ] 提出了基于三波段法[55 ] 和四波段法[6 ] 改进后的三波段指数法,并在中国滇池和日本霞浦湖得到了较好的应用,精度相较于原始的三波段法有所提高。该方法基于四波段法的具体形式,但没有引入第四波段,而是重复使用第二波段以代替第四波段:
1 R r s λ 1 - 1 R r s λ 2 ÷ 1 R r s λ 3 - 1 R r s λ 2 = a p h λ 1 + a w λ 1 - a w λ 2 a w λ 3 - a w λ 2 (20)
C h l a = 161.24 × R r s - 1 665 - R r s - 1 708 R r s - 1 753 - R r s - 1 708 + 28.04 (21)
其中:a p h λ 1 λ 1 a w λ λ
3.3.3 归一化叶绿素a指数法
为提高叶绿素a反演算法在卫星数据以及不同水域的适用性,Mishra等[60 ] 提出了归一化叶绿素a指数法(NDCI),并基于NDCI开发了二次多项式反演算法。如式(22)所示,NDCI与在植被遥感中得到广泛应用的NDVI(归一化植被指数)异曲同工,同样使用近红外和红外两个波段反射率的加和来对其差值进行归一化处理,以消除季节太阳方位角差异和大气条件等对反演精度的影响。该算法在多个内陆、河口和港湾水域均得到了较好的应用,反演效果更优。
C h l a ∝ R r s 708 - R r s 665 R r s 708 + R r s 665 (22)
3.3.4 合成叶绿素a指数法
长江河口因水体悬浮物浓度(SSCs)较高,导致近红外波段处散射作用较强,给叶绿素a的反演带来了一定挑战,Shen等[23 ] 为了解决这一问题,提出了合成叶绿素a指数(SCI)算法。SCI算法引入了两个参数,H c h l H Δ 式(23)和式(24)所示,其中,H c h l
H c h l = R r s λ 4 + λ 4 - λ 3 λ 4 - λ 2 R r s λ 2 - R r s λ 4 - R r s λ 3 (23)
H Δ = R r s λ 2 - R r s λ 4 + λ 4 - λ 2 λ 4 - λ 1 R r s λ 1 - R r s λ 4 (24)
其中:H c h l H Δ
当应用到MERIS上时,λ 1-4 分别为560、620、665和681 nm,代入相应波段后,H c h l H Δ
S C I = H c h l - H Δ (25)
S C I = α 0 + α 11 C c h l + α 22 C c h l 2 (26)
其中:α 0 α 11 α 22 C c h l
3.4 智能算法
智能算法指的是基于人工智能的算法,包括神经网络算法和支持向量机算法等。此类算法在解决复杂水域中的非线性问题具有优势。
3.4.1 神经网络算法
Awad[31 ] 基于Hyperion星载高光谱图像,使用监督式前馈反向传播人工神经网络算法(ANN-BP)估算黎巴嫩海岸区叶绿素a浓度。结果表明,使用ANN-BP算法,基于两年数据,实验区的决定系数R 2 可高达0.89和0.96,且均方根误差RMSE仅为0.03和0.45 mg/m3 。因近岸海域水体成分复杂,数据多呈现非线性关系,而人工神经网络在解决非线性问题上具有优势,为此类水域叶绿素a及其他水体光学组分浓度的反演提供了新思路。国内学者朱云芳等[34 ] 应用高分一号卫星的WFV4影像数据,采用BP神经网络算法反演太湖叶绿素a浓度,相较于传统的波段比值算法,该算法可有效提高叶绿素a反演精度。此外,Ioannou等[61 ] 使用多层感知器神经网络算法(MLPNN),基于MODIS可见光波段的反射率来反演水体固有光学特性指标IOPs,并使用反演出的IOPs以及对应的反射率值作为输入集,来训练另一个神经网络算法,最终输出叶绿素a浓度。这一算法的准确性高于未使用IOPs作为输入变量的算法以及传统的MODIS OC3算法。
3.4.2 支持向量机算法
除人工神经网络算法外,支持向量机算法在解决非线性问题上也具有一定优势。杨国范等[29 ] 利用Landsat星载陆地成像仪数据,基于与叶绿素a浓度相关系数最高的波段或波段组合,比较了比值线性回归算法和最小二乘支持向量机算法(LS-SVM)在夏季清河水库中的反演效果,结果表明,相较于比值线性回归算法,LS-SVM算法能够有效提高R 2 (0.635~0.966),并减少均方根误差(4.83~2.67 mg/m3 )和平均相对误差(16.43%~7.21%),反演精度得到明显提高。而夏晓芸等[33 ] 在此基础上,采用了环境卫星多日共186组数据对大伙房水库的叶绿素a浓度进行反演,进一步验证了LS-SVM反演算法应用于内陆清洁水库的优越性。
3.5 基于水体分类的算法体系
不同水体光学特征不同,而单一算法在遇到某些水体时往往反演精度不足,故发展出了基于水体分类的算法体系[22 , 62 ] 。为进一步验证各类叶绿素a反演算法的普适性,深入分析各类水体的特征及其与不同算法的匹配程度,Neil等[63 ] 针对13种光学水体类型(OWTs),共列举了48种叶绿素a浓度反演算法,收集了源于185个内陆和沿岸水体的实测数据集,进而对比讨论了各类算法的反演精度和适用性。基于Spyrakos等[64 ] 提出的水体分类标准,Neil等[63 ] 开发了针对不同类型水体,同时考虑时空差异性的最佳算法参数组合,即动态变化算法(Dynamic Swit-ching Algorithm),而不是寻求单一参数配置的普适性算法。结果表明,该套算法将反演精度提高25%,相关系数达0.89,平均绝对误差仅为0.18 mg/m3 。
3.6 分析类算法
分析类算法基于水中光学辐射传输机理,具有明确的物理意义,主要利用水体组分与固有光学量、表观光学量和固有光学量之间的关系,来模拟水中的光场分布,进而反演水质参数[65 ] 。分析类算法最早源于Gordon等[66 ] 在1975年提出的生物光学算法。后Hoogenboom等[12 ] 使用矩阵反演的方法,基于生物光学模型,对叶绿素和悬浮物浓度进行了反演。Maritorena等[67 ] 开发了出了针对大洋类水体的GSM模型(Garver–Siegel–Maritorena model),反演精度与传统OC4v4算法相近,且可运用到SeaWiFS影像上。Lee等[68 ] 则开发出了针对二类水体的QAA(Quasi-Analytical Algorithm)算法,其中555 nm处的吸收系数由经验推导而得,在更复杂水域中的适用性有待验证。
但由于分析算法中的部分参数需要根据经验进行假定,研究区域的变化会导致参数发生变化,故国外学者开发的算法不能直接照搬到我国的水体中。为此,李云梅等[65 ] 基于Gordon模型对太湖叶绿素浓度进行反演,取得了不错的效果,但同时也指出模型参数受环境条件影响较大,各水体组分的固有光学特性也受到季节和区域因素的影响。因此,需要对特定水体各组分的光学特性进行更深入的研究。为解决上述问题,李俊生等[69 ] 建立了太湖单位固有光学量(SIOPs)数据库,进一步发展了三类分析方法,并使用了航空高光谱图像进行检验。韩留生等[70 ] 采用模拟退火算法,对生物光学模型中的悬浮物后向散射系数和双向反射因子进行了优化,为分析类算法应用于不同近岸水体中,提供了参数优化手段方面的参考。
4 各种算法的比较及适用性分析
此章节旨在探讨各类水体叶绿素a反演算法的适应性及优缺点,包括归纳各类算法适用的叶绿素浓度区间及水体类型,分析不同卫星传感器的特点并列举出不同算法所选用的波段及传感器,以及对各类算法的优缺点进行总结。
4.1 叶绿素浓度区间
根据Carlson和Simpson[71 ] 的分类标准,叶绿素浓度小于2.6 mg/m3 的为贫营养水体;叶绿素浓度大于2.6且小于20 mg/m3 的为中营养水体;叶绿素浓度大于20且小于56 mg/m3 的为富营养水体;叶绿素浓度大于56 mg/m3 的为超富营养水体。图2 为算法应用到的叶绿素浓度区间,由图2 可知,除去精度不高的FLH BLUE/VIOLET算法(R 2 =0.38/0.55),FLH算法适用于中低水平叶绿素浓度的水体;NFH、FEA和MPH算法适用的浓度区间范围较广;MCI在贫营养水体中不太适用;针对大洋类水体的OCx和Hu指数算法适用于中低浓度叶绿素水体,但在低浓度水体中表现更好(OCx算法数据集的叶绿素浓度区间集中在0.08~3 mg/m3 ;Hu指数算法在叶绿素a浓度小于0.25mg/m3 的海洋中表现更佳);波段算法BDA(除OCx外)主要适用于中高浓度叶绿素水体,相较于部分荧光峰、反射峰类算法,适用的浓度范围要更窄;Yang指数算法适用于富营养化或超富营养化水体;NDCI、SCI和LS-SVM算法不太适用于超富营养化水体;神经网络算法既可用于叶绿素浓度极低(<0.01 mg/m3 )的水体,也可用于超富营养化水体;动态变化算法适用的浓度区间最广;分析类算法同样具有较好的适用性。
图2
图2
算法应用的叶绿素a浓度区间
Fig.2
Chlorophyll-a concentration ranges of retrieval applications
4.2 水体类型
Ⅰ类水体组成成分相较于Ⅱ类水体要更加简单,其光学性质主要受到浮游植物及其伴生物的影响,故针对Ⅰ类水体的OCx和Hu指数算法均在全球大范围海域内得到应用。而Ⅱ类水体的光学性质还受到悬浮物和黄色物质的影响,水体组分复杂多变,给叶绿素a浓度反演带来了很大的不确定性[72 ] ,故除算法体系外,针对Ⅱ类水体的算法应用范围比较受限,大部分仅在特定的实验水域内得到验证。其中,MPH、2/3BD(除OCx外)以及NN算法在较多种不同水域中得到应用,适用水体类型相对较广。分析类算法在各类水体中的适用性都较高。不同算法适用的水体类型如图3 所示,此处Open Sea指的是没有被任何陆地包围的海洋主体部分,Inland Water指的是湖泊、水库及河流内陆部分的水域,Costal Water指的是海岸、河口和三角洲等海陆交汇区。需要注意的是,虽然荧光峰算法已应用于图中三类水域中,但针对内陆水体FLH BLUE/VIOLET算法精度不高,荧光峰算法在此类水域的反演精度有待进一步验证和提高。
图3
图3
算法适用的水体类型
Fig.3
Integration schematic of the applicative water types of different algorithms
4.3 波段及卫星传感器
因不同传感器波段配置不同,有的能够很好地反映算法中所使用的光谱波段,有的传感器则无法涵盖某些叶绿素a特征波段,故不同的叶绿素a反演算法在不同的传感器中适应性有较大差异[11 ] 。如果波段位置接近于叶绿素a的特征波长时,较窄的波段宽度有利于提高算法精度;而当波段位置距叶绿素a特征波长较远时,适当地增加波段宽度能够更好地获取叶绿素a特征信息[73 ] 。例如,Landsat 8的波段配置使其无法检测到叶绿素a近红外波段的特征波峰,即使是使用改进后的FLH-Violet算法,算法反演效果也不太理想[11 , 28 ] ;MODIS的空间分辨率较低,故不适用于中小型湖泊叶绿素a浓度反演;MERIS经常应用于监测中大型水体水华爆发情况,但同样因为空间分辨率较低的原因,不适用于狭长型小水体;Hyperion波段较多较密,在光谱分辨率和空间分辨率上都具有优势,但重返周期长,时间分辨率较低。各类算法所用波段以及在不同卫星传感器的应用情况如表2 所示。
4.4 优缺点分析
表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结。其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] 。蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法。各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究。基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高。分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性。
5 结 语
经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果。但依旧面临以下挑战,有待加强研究:
(1)水体叶绿素a遥感算法历经几十年的发展,在Ⅰ类水体中已取得较好的成果,基本能够实现大范围反演,反演算法外推性适应性较强。而对于Ⅱ类水体而言,由于悬浮物、黄色物质等光学活性组分的影响,光学特性复杂,反演难度较大。各反演算法仍受到季节、地理位置以及水体类型等的限制。很多学者对已有方法进行了对比,但多数仅针对某个水体进行经验性验证,缺乏深入分析,得出的算法孰优孰劣的结论也不尽相同[73 , 75 -78 ] ,全球尺度的普适性算法缺乏。为了能够在更大的时间、空间尺度上建立起业务化、普适性叶绿素a反演算法或算法体系,应当建立并完善类似于NOMAD等[79 ] 的实测数据集。针对基于水体分类的反演算法体系,还应充分挖掘不同水体的光学特性,深入探究水体光学特性对水面遥感反射率的影响,细化水体分类标准,提高分类准确性。
(2)城市河网、湖泊等内陆水体的水质监测一般对空间、光谱和时间分辨率要求较高。大部分传感器常因空间分辨率不足,导致样点有限[11 ] 。而空间分辨率与光谱分辨率存在相互制约的关系,一味提高空间分辨率将影响传感器的光谱分辨率。从长远来看,进一步推动针对内陆水体水质监测的传感器研发是十分有必要的。就当下而言,随着无人机技术的发展,将机载高光谱传感器与低成本无人机技术相结合,也可为内陆水体水质监测提供另一种思路。高光谱传感器能够更充分地提取叶绿素a及其他水体光学活性组分的光学信号,无人机更适用于上述小型水域,且能够进一步覆盖偏远、缺乏实测数据的水域,细化并完善水体富营养化监测。
(3)随着人工智能等技术的进步,机器学习等手段在遥感数据处理中得到越来越多的应用。神经网络、支持向量机等算法在解决非线性问题方面具有优势,且算法精度相对传统算法有所提高。然而,深度神经网络等机器学习算法缺乏可解释性,变量之间确切的因果关系尚未明晰[80 ] 。未来在全球尺度下验证已有机器学习算法的基础上,进一步开发新型算法也是十分有必要的。除此之外,不能只满足于算法准确性的提高,应加强对机器学习算法内在机理的探析,发展与物理建模相结合的物理原理约束的机器学习方法。
参考文献
View Option
[1]
Klemas V Remote Sensing of Algal Blooms: An Overview with Case Studies
[J]. Journal of Coastal Research , 2012 , 28 (1A ): 34 -43 .
[本文引用: 1]
[2]
Andrade C Alcantara E Bernardo N et al An Assessment of Semi-analytical Models based on the Absorption Coefficient in Retrieving the Chlorophyll-a Concentration from a Reservoir
[J]. Advances in Space Research , 2019 , 63 (7 ): 2175 -2188 .
[本文引用: 1]
[3]
Dodds W K Trophic State, Eutrophication and Nutrient Criteria in Streams
[J]. Trends in Ecology & Evolution , 2007 , 22 (12 ): 669 -676 .
[本文引用: 1]
[4]
Shi K Zhang Y L Song K S et al A Semi-analytical Approach for Remote Sensing of Trophic State in Inland Waters: Bio-Optical Mechanism and Application
[J]. Remote Sensing of Environment , 2019 , 232 (C ):111349 . doi: 10.1016/j.rse. 2019.111349 .
[本文引用: 2]
[5]
El-Alem A Chokmani K Laurion I et al Comparative Analysis of Four Models to Estimate Chlorophyll-a Concentration in Case-2 Waters Using Moderate Resolution Imaging Spectroradiometer(Modis) Imagery
[J]. Remote Sensing , 2012 , 4 (8 ): 2373 -2400 . doi: 10.3390/rs4082373 .
[本文引用: 1]
[6]
Le C F Li Y M Zha Y et al A Four-band Semi-analytical Model for Estimating Chlorophyll a in Highly Turbid Lakes: The Case of Taihu Lake, China
[J]. Remote Sensing of Environment , 2009 , 113 (6 ): 1175 -1182 .
[本文引用: 4]
[7]
Gordon H R Brown O B Evans R H et al A Semianalytic Radiance Model of Ocean Color
[J]. Journal of Geophysical Research-Atmospheres , 1988 , 93 (D9 ): 10909 -10924 .
[本文引用: 1]
[8]
Pan Yingyang Guo Qiaozhen Sun Jinhua Advances in Remote Sensing Inversion Method of Chlorophyll a Concentration
[J]. Science of Surveying and Mapping , 2017 ,42 (1 ): 43 -48 .
[本文引用: 1]
潘应阳 , 国巧真 , 孙金华 水体叶绿素 a 浓度遥感反演方法研究进展
[J]. 测绘科学 , 2017 ,42 (1 ):43 -48 .
[本文引用: 1]
[9]
Jiang Qian Cao Yin Zhao Hongli et al Modeling of Turbidity Retrieval of Hulunnaoer Lake based on Airborne Hyperspectral Imagery
[J]. South to North Water Transfers and Water Science&Technology ,2020 ,18 (6 ):101 -109 .
[本文引用: 1]
姜倩 ,曹引 , 赵红莉 , 等 基于航空高光谱的囫囵淖尔水体浊度反演建模
[J]. 南水北调与水利科技(中英文) ,2020 ,18 (6 ):101 -109 .
[本文引用: 1]
[10]
Yang Zhen Lu Xiaoping Wu Yongbin et al Retrieval and Model Construction of Water Quality Parameters for UAV Hyperspectral Remote Sensing
[J]. Science of Surveying and Mapping , 2020 , 45 (9 ): 60 -64 , 95 .
[本文引用: 1]
杨振 , 卢小平 , 武永斌 , 等 无人机高光谱遥感的水质参数反演与模型构建
[J]. 测绘科学 , 2020 , 45 (9 ): 60 -64 , 95 .
[本文引用: 1]
[11]
Johansen R Beck R Nowosad J et al Evaluating the Portability of Satellite Derived Chlorophyll-a Algorithms for Temperate Inland Lakes Using Airborne Hyperspectral Imagery and Dense Surface Observations
[J]. Harmful Algae , 2018 , 76 : 35 -46 . doi: 10.1016/j.hal.2018.05.001 .
[本文引用: 6]
[12]
Hoogenboom H J Dekker A G Dehaan J F Retrieval of Chlorophyll and Suspended Matter from Imaging Spectrometry Data by Matrix Inversion
[J]. Canadian Journal of Remote Sensing , 1998 , 24 (2 ): 144 -152 .
[本文引用: 2]
[13]
Hoogenboom H J Dekker A G Althuis I A Simulation of Aviris Sensitivity for Detecting Chlorophyll over Coastal and Inland Waters
[J]. Remote Sensing of Environment , 1998 , 65 (3 ): 333 -340 .
[本文引用: 1]
[14]
Moses W J Gitelson A A Perk R L et al Estimation of Chlorophyll-a Concentration in Turbid Productive Waters Using Airborne Hyperspectral Data
[J]. Water Research , 2012 , 46 (4 ): 993 -1004 .
[本文引用: 1]
[15]
Olmanson L G Brezonik P L Bauer M E Airborne Hyperspectral Remote Sensing to Assess Spatial Distribution of Water Quality Characteristics in Large Rivers: The Mississippi River and Its Tributaries in Minnesota
[J]. Remote Sensing of Environment ,2013 ,130 :254 -265 .doi:10.1016/j.rse.2012. 11.023
[本文引用: 1]
[16]
Gordon H R Clark D K Brown J W et al Phytoplankton Pigment Concentrations in the Middle Atlantic Bight: Comparison of Ship Determinations and Czcs Estimates
[J]. Applied Optics , 1983 , 22 (1 ): 20 -36 .
[本文引用: 1]
[17]
Tang D L Ni I H Muller-Karger F E et al Monthly Variation of Pigment Concentrations and Seasonal Winds in China's Marginal Seas
[J]. Hydrobiologia , 2004 , 511 (1 ): 1 -15 . doi: 10.1023/B:HYDR.0000014001.43554.6f .
[本文引用: 1]
[18]
O’Reilly J E Maritorena S O’Brien M et al Seawifs Postlaunch Calibration and Validation Analyses,Part 3
[J]. NASA Tech Memo , 2000 , 206892 (11 ):3 -8 . doi: 10.1103/PhysRevD.55.2827 .
[本文引用: 4]
[19]
Wu X Duan H Bi N et al Interannual and Seasonal Variation of Chlorophyll-a off the Yellow River Mouth(1997–2012): Dominance of River Inputs and Coastal Dynamics
[J]. Estuarine , Coastal and Shelf Science, 2016 , 183 : 402 -412 . doi: 10.1016/j.ecss.2016.08.038 .
[本文引用: 1]
[20]
Gurlin D Gitelson A A Moses W J Remote Estimation of Chl-a Concentration in Turbid Productive Waters — Return to a Simple Two-band Nir-red Model?
[J]. Remote Sensing of Environment , 2011 , 115 (12 ): 3479 -3490 .
[本文引用: 6]
[21]
Hu C Lee Z Franz B Chlorophyll Algorithms for Oligotrophic Oceans: A Novel Approach Based on Three‐band Reflectance Difference
[J].Journal of Geophysical Research:Oceans , 2012 ,117 (C ):01011 . doi: 10.1029/2011JC007395 .
[本文引用: 3]
[22]
Zhang F F Li J S Shen Q et al A Soft-classification-based Chlorophyll-a Estimation Method Using Meris Data in the Highly Turbid and Eutrophic Taihu Lake
[J]. International Journal of Applied Earth Observation and Geoinformation , 2019 ,74 :138 -149 . doi: 10.1016/j.jag.2018.07.018 .
[本文引用: 2]
[23]
Shen F Zhou Y X Li D J et al Medium Resolution Imaging Spectrometer(MERIS) Estimation of Chlorophyll-a Concentration in the Turbid Sediment-laden Waters of the Changjiang(Yangtze) Estuary
[J]. International Journal of Remote Sensing ,2010 ,31 (17-18 ):4635 -4650 .
[本文引用: 3]
[24]
Wang M H Son S Viirs-derived Chlorophyll-a Using the Ocean Color Index Method
[J].Remote Sensing of Environment ,2016 ,182 :141 -149 . doi: 10.1016/j.rse.2016.05.001 .
[本文引用: 1]
[25]
Bao Ying Tian Qingjiu Cheng Ming et al Analysis on Diurnal Variation of Chlorophyll-a Concentration of Taihu Lake based on Optical Classification with GOCI Data
[J]. Spectroscopy and Spectral Analysis ,2016 ,36 (8 ):2562 -2567 .
[本文引用: 1]
包颖 ,田庆久 ,陈旻 ,等 基于GOCI影像分类的太湖水体叶绿素 a 浓度日变化分析
[J]. 光谱学与光谱分析 ,2016 ,36 (8 ):2562 -2567 .
[本文引用: 1]
[26]
Du C Li Y Wang Q et al Tempo-spatial Dynamics of Water Quality and Its Response to River Flow in Estuary of Taihu Lake Based on GOCI Imagery
[J]. Environmental Science & Pollution Research , 2017 ,24 (36 ): 28079 -28101 .
[本文引用: 1]
[27]
Shanmugam P He X Q Singh R K et al A Modern Robust Approach to Remotely Estimate Chlorophyll in Coastal and Inland Zones
[J]. Advances in Space Research , 2018 ,61 (10 ): 2491 -2509 .
[本文引用: 1]
[28]
Beck R Zhan S G Liu H X et al Comparison of Satellite Reflectance Algorithms for Estimating Chlorophyll-a in a Temperate Reservoir Using Coincident Hyperspectral Aircraft Imagery and Dense Coincident Surface Observations
[J]. Remote Sensing of Environment ,2016 ,178 :15 -30 . doi: 10.1016/j.rse.2016.03.002 .
[本文引用: 4]
[29]
Yang Guofan Yan Mengdong Yin Fei Inversion Modeling of Chlorophyll-a in Qinghe Reservoir
[J]. Remote Sensing of Information ,2016 ,31 (5 ):74 -78 .
[本文引用: 3]
杨国范 ,阎孟冬 ,殷飞 清河水库叶绿素 a 浓度反演模型研究
[J]. 遥感信息 ,2016 ,31 (5 ):74 -78 .
[本文引用: 3]
[30]
Liu F F Chen C Q Tang S L et al Retrieval of Chlorophyll a Concentration from a Fluorescence Enveloped Area Using Hyperspectral Data
[J]. International Journal of Remote Sensing ,2011 ,32 (13 ):3611 -3623 .
[本文引用: 3]
[31]
Awad M Sea Water Chlorophyll-a Estimation Using Hyperspectral Images and Supervised Artificial Neural Network
[J]. Ecological Informatics ,2014 ,24 :60 -68 . doi:10.1016/j.ecoinf. 2014.07.004 .
[本文引用: 3]
[32]
Tian H J Cao C X Xu M et al Estimation of Chlorophyll-a Concentration in Coastal Waters with HJ-LA Hsi Data Using a Three-band Bio-optical Model and Validation
[J]. International Journal of Remote Sensing ,2014 ,35 (16 ):5984 -6003 .
[本文引用: 1]
[33]
Xia Xiaoyun Xie Qimeng Yang Guofan et al A Study on Remote Sensing Inversion Model of Chlorophyll-a in Dahuofang Reservoir based on HJ-1A/1B Data
[J]. Water Saving Irrigation ,2018 (8 ):39 -42 ,46 .
[本文引用: 3]
夏晓芸 ,解启蒙 ,杨国范 ,等 大伙房水库叶绿素a浓度反演模型研究
[J].节水灌溉 ,2018 (8 ):39 -42 ,46 .
[本文引用: 3]
[34]
Zhu Yunfang Zhu Li Li Jiaguo et al The Study of Inversion of Chlorophyll a in Taihu based on GF-1 WFV Image and BP Neural Network
[J]. Acta Scientiae Circumstantiae , 2017 ,37 (1 ):130 -137 .
[本文引用: 3]
朱云芳 , 朱利 , 李家国 , 等 基于 GF-1 WFV 影像和BP神经网络的太湖叶绿素 a 反演
[J]. 环境科学学报 , 2017 ,37 (1 ):130 -137 .
[本文引用: 3]
[35]
Xiong Y J Ran Y L Zhao S H et al Remotely Assessing and Monitoring Coastal and Inland Water Quality in China: Progress,Challenges and Outlook
[J].Critical Reviews in Environmental Science and Technology ,2020 :50 (12 ):1266 -1302 .doi: 10.1080/10643389.2019.1656511 .
[本文引用: 1]
[36]
Zhang Qifei Wu Zhifeng Xie Xuetong Research Progress of the Inversion Algorithm of Chlorophyll-a Concentration in Estuaries and Coastal Waters
[J]. Ecological Science , 2017 , 36 (5 ): 215 -222 .
[本文引用: 1]
张棋斐 , 吴志峰 , 解学通 河口及近岸海域水体叶绿素浓度反演方法综述
[J]. 生态科学 , 2017 , 36 (5 ): 215 -222 .
[本文引用: 1]
[37]
Neville R A Gower J F R Passive Remote Sensing of Phytoplankton Via Chlorophyll Α Fluorescence
[J]. Journal of Geophysical Research , 1977 , 82 (24 ): 3487 -3493 .
[本文引用: 1]
[38]
Gilerson A Zhou J Hlaing S et al Fluorescence Component in the Reflectance Spectra from Coastal Waters, Dependence on Water Composition
[J]. Optics Express , 2007 , 15 (24 ): 15702 -15721 .
[本文引用: 1]
[39]
Gower J F R Observations of In-situ Fluorescence of Chlorophyll- a in Saanich Inlet
[J]. Boundary-layer Meteorology , 1980 , 18 (3 ): 235 -245 .
[本文引用: 1]
[40]
Gower J F R Doerffer R Borstad G A Interpretation of the 685 nm Peak in Water-leaving Radiance Spectra in Terms of Fluorescence, Absorption and Scattering, and Its Observation by Meris
[J]. International Journal of Remote Sensing , 1999 , 20 (9 ): 1771 -1786 .
[本文引用: 2]
[41]
Hu C M Muller-Karger F E Taylor C et al Red Tide Detection and Tracing Using MODIS Fluorescence Data: A Regional Example in SW Florida Coastal Waters
[J]. Remote Sensing of Environment , 2005 , 97 (3 ): 311 -321 .
[本文引用: 2]
[42]
Vos W Donze M Buiteveld H On the Reflectance Spectrum of Algae in Water: The Nature of the Peak at 700 nm and Its Shift with Varying Algal Concentration
[M]. Delft University of Technology , Faculty of Civil Engineering , 1986 .
[本文引用: 1]
[43]
Zhao Dongzhi Zhang Fengshou Yang Jianhong et al The Optimized Spectral Bands Ratio for the Relation of Sun-Induced Chlorophyll Fluorescence Height with High Chlorophyll a Concentration of Algal Bloom Waters
[J]. Acta Oceanologica Sinica , 2005 , 27 (6 ): 146 -153 .
[本文引用: 1]
赵冬至 , 张丰收 , 杨建洪 , 等 表征赤潮水体太阳激发的叶绿素荧光高度的波段优化-归一化荧光高度法
[J]. 海洋学报 , 2005 , 27 (6 ): 146 -153 .
[本文引用: 1]
[44]
Xing Xiaogang Zhao Dongzhi Liu Yuguang et al Progress in Fluorescence Remote Sensing of Chlorophyll-a
[J]. Journal of Remote Sensing , 2007 , 11 (1 ): 137 -144 .
[本文引用: 2]
邢小罡 , 赵冬至 , 刘玉光 , 等 叶绿素 a 荧光遥感研究进展
[J]. 遥感学报 , 2007 , 11 (1 ): 137 -144 .
[本文引用: 2]
[45]
Gitelson A The Peak near 700 nm on Radiance Spectra of Algae and Water-relationships of Its Magnitude and Position with Chlorophyll Concentration
[J]. International Journal of Remote Sensing , 1992 , 13 (17 ): 3367 -3373 .
[本文引用: 2]
[46]
Matthews M W Bernard S Robertson L An Algorithm for Detecting Trophic Status(Chlorophyll-a), Cyanobacterial-Dominance, Surface Scums and Floating Vegetation in Inland and Coastal Waters
[J]. Remote Sensing of Environment , 2012 , 124 : 637 -652 . doi: 10.1016/j.rse.2012.05.032 .
[本文引用: 3]
[47]
Binding C E Greenberg T A Bukata R P The Meris Maximum Chlorophyll Index; Its Merits and Limitations for Inland Water Algal Bloom Monitoring
[J]. Journal of Great Lakes Research , 2013 , 39 : 100 -107 . doi: 10.1016/j.jglr.2013.04.005 .
[本文引用: 2]
[48]
Odermatt D Gitelson A Brando V E et al Review of Constituent Retrieval in Optically Deep and Complex Waters from Satellite Imagery
[J]. Remote Sensing of Environment , 2012 , 118 : 116 -126 . doi: 10.1016/j.rse.2011.11.013 .
[本文引用: 1]
[49]
O'Reilly J E Werdell P J Chlorophyll Algorithms for Ocean Color Sensors-Oc4, Oc5 & Oc6
[J]. Remote Sensing of Environment , 2019 , 229 : 32 -47 . doi: 10.1016/j.rse.2019.04.021 .
[本文引用: 1]
[50]
Gilerson A A Gitelson A A Zhou J et al Algorithms for Remote Estimation of Chlorophyll-a in Coastal and Inland Waters Using Red and near Infrared Bands
[J]. Optics Express , 2010 , 18 (23 ): 24109 -24125 .
[本文引用: 5]
[51]
Moses W J Gitelson A A Berdnikov S et al Satellite Estimation of Chlorophyll-a Concentration Using the Red and Nir Bands of Meris—the Azov Sea Case Study
[J]. IEEE Geoscience and Remote Sensing Letters , 2009 , 6 (4 ): 845 -849 .
[本文引用: 5]
[52]
Dall'Olmo G Gitelson A A Rundquist D C Towards a Unified Approach for Remote Estimation of Chlorophyll-a in Both Terrestrial Vegetation and Turbid Productive Waters
[J]. Geophysical Research Letters ,2003 ,30 (18 ): 1938 . doi:10.1029/2003GL018065 .
[本文引用: 1]
[53]
Gitelson A A Gritz Y Merzlyak M N Relationships between Leaf Chlorophyll Content and Spectral Reflectance and Algorithms for Non-destructive Chlorophyll Assessment in Higher Plant Leaves
[J]. Journal of Plant Physiology , 2003 , 160 (3 ): 271 -282 .
[本文引用: 1]
[54]
Du Cong Wang Shixin Zhou Yi et al Remote Chlorophyll a Retrieval in Taihu Lake by Three-band Model Using Hyperion Hyperspectral Data
[J]. Enviromental Science , 2009 , 30 (10 ): 2904 -2910 .
[本文引用: 2]
杜聪 , 王世新 , 周艺 , 等 利用 Hyperion 高光谱数据的三波段法反演太湖叶绿素 a 浓度
[J]. 环境科学 , 2009 , 30 (10 ): 2904 -2910 .
[本文引用: 2]
[55]
Gitelson A A Dall'Olmo G Moses W et al A Simple Semi-analytical Model for Remote Estimation of Chlorophyll-a in Turbid Waters: Validation
[J]. Remote Sensing of Environment , 2008 , 112 (9 ): 3582 -3593 .
[本文引用: 2]
[56]
Gons H J Optical Teledetection of Chlorophyll a in Turbid Inland Waters
[J]. Environmental Science & Technology , 1999 , 33 (7 ): 1127 -1132 .
[本文引用: 2]
[57]
Gons H J Rijkeboer M Ruddick K G A Chlorophyll-Retrieval Algorithm for Satellite Imagery(Medium Resolution Imaging Spectrometer) of Inland and Coastal Waters
[J]. Journal of Plankton Research , 2002 , 24 (9 ): 947 -951 .
[本文引用: 2]
[58]
Gons H J Rijkeboer M Ruddick K G Effect of a Waveband Shift on Chlorophyll Retrieval from Meris Imagery of Inland and Coastal Waters
[J]. Journal of Plankton Research , 2005 , 27 (1 ): 125 -127 .
[本文引用: 1]
[59]
Yang W Matsushita B Chen J et al An Enhanced Three-band Index for Estimating Chlorophyll-a in Turbid Case-Ii Waters: Case Studies of Lake Kasumigaura, Japan, and Lake Dianchi, China
[J]. IEEE Geoscience and Remote Sensing Letters , 2010 , 7 (4 ): 655 -659 .
[本文引用: 2]
[60]
Mishra S Mishra D R Normalized Difference Chlorophyll Index: A Novel Model for Remote Estimation of Chlorophyll-a Concentration in Turbid Productive Waters
[J]. Remote Sensing of Environment ,2012 ,117 :394 -406 .doi:10.1016/j.rse. 2011.10.016 .
[本文引用: 2]
[61]
Ioannou I Gilerson A Gross B et al Deriving Ocean Color Products Using Neural Networks
[J]. Remote Sensing of Environment , 2013 , 134 : 78 -91 . doi: 10.1016/j.rse.2013.02.015 .
[本文引用: 2]
[62]
Le C F Li Y M Zha Y et al Remote Estimation of Chlorophyll a in Optically Complex Waters based on Optical Classification
[J]. Remote Sensing of Environment , 2011 , 115 (2 ): 725 -737 .
[本文引用: 1]
[63]
Neil C Spyrakos E Hunter P D et al A Global Approach for Chlorophyll-a Retrieval across Optically Complex Inland Waters based on Optical Water Types
[J]. Remote Sensing of Environment ,2019 ,229 :159 -178 . doi:10.1016/j.rse.2019. 04.027 .
[本文引用: 3]
[64]
Spyrakos E O'Donnell R Hunter P D et al Optical Types of Inland and Coastal Waters
[J]. Limnology and Oceanography , 2018 , 63 (2 ): 846 -870 .
[本文引用: 1]
[65]
Li Yunmei Huang Jiazhu Wei Yuchun et al Inversing Chlorophyll Concentration of Taihu Lake by Analytic Model
[J]. Journal of Remote Sensing ,2006 ,11 (2 ):169 -175 .
[本文引用: 3]
李云梅 , 黄家柱 ,韦玉春 ,等 用分析模型方法反演水体叶绿素的浓度
[J]. 遥感学报 , 2006 ,11 (2 ):169 -175 .
[本文引用: 3]
[66]
Gordon H R Brown O B Jacobs M M Computed Relationships between the Inherent and Apparent Optical Properties of a Flat Homogeneous Ocean
[J]. Applied Optics , 1975 , 14 (2 ): 417 -427 .
[本文引用: 1]
[67]
Maritorena S Siegel D A Peterson A R Optimization of a Semianalytical Ocean Color Model for Global-scale Applications
[J]. Applied Optics , 2002 , 41 (15 ): 2705 -2714 .
[本文引用: 2]
[68]
Lee Z P Carder K L Amone R A Deriving Inherent Optical Properties from Water Color: A Multiband Quasi-Analytical Algorithm for Optically Deep Waters
[J]. Applied Optics , 2002 , 41 (27 ): 5755 -5772 .
[本文引用: 2]
[69]
Zhang Bing Shen Qian Li Junsheng et al Retrieval of Three Kinds of Representative Water Quality Parameters of Lake Taihu from Hyperspectral Remote Sensing Data
[J]. Journal of Lake Sciences , 2009 ,21 (2 ):182 -192 .
[本文引用: 1]
张兵 , 申茜 , 李俊生 , 等 太湖水体3种典型水质参数的高光谱遥感反演
[J]. 湖泊科学 , 2009 ,21 (2 ):182 -192 .
[本文引用: 1]
[70]
Han Liusheng Chen Shuisen Li Dan et al Optimization of Bio-Optical Algorithm Parameters in Coastal CASE-II Waters
[J]. Tropical Geography , 2014 ,34 (3 ):351 -358 .
[本文引用: 2]
韩留生 , 陈水森 , 李丹 , 等 近岸二类水体生物光学模型参数优化
[J]. 热带地理 , 2014 ,34 (3 ):351 -358 .
[本文引用: 2]
[71]
Carlson R E Simpson J A Coordinator’s Guide to Volunteer Lake Monitoring Methods
[J]. North American Lake Management Society , 1996 , 96 : 305 .
[本文引用: 1]
[72]
Yang Jianhong Wang Jin Zhao Dongzhi Review on the Atmospheric Correction of Ocean Color Remote Sensing
[J]. Marin Environmental Science , 2008 , 27 (1 ):97 -100 .
[本文引用: 1]
杨建洪 , 王锦 , 赵冬至 海洋水色遥感大气校正算法研究进展
[J]. 海洋环境科学 , 2008 ,27 (1 ):97 -100 .
[本文引用: 1]
[73]
Wang Shanshan Li Yunmei Wang Yongbo et al Suitability of the Retrieval Models for Estimating Chlorophyll Concentration in Lake Taihu
[J]. Journal of Lake Science , 2015 , 27 (1 ): 150 -162 .
[本文引用: 2]
王珊珊 , 李云梅 , 王永波 , 等 太湖水体叶绿素浓度反演模型适宜性分析
[J]. 湖泊科学 , 2015 , 27 (1 ): 150 -162 .
[本文引用: 2]
[74]
Matthews M W Bernard S Winter K Remote Sensing of Cyanobacteria-dominant Algal Blooms and Water Quality Parameters in Zeekoevlei, a Small Hypertrophic Lake, Using Meris
[J]. Remote Sensing of Environment , 2010 , 114 (9 ): 2070 -2087 .
[本文引用: 1]
[75]
Augusto-Silva P B Ogashawara I Barbosa C C F et al Analysis of Meris Reflectance Algorithms for Estimating Chlorophyll-a Concentration in a Brazilian Reservoir
[J]. Remote Sensing ,2014 ,6 (12 ):11689 -11707 . doi:10.3390/rs61211689 .
[本文引用: 1]
[76]
Le C F Hu C M Cannizzaro J et al Evaluation of Chlorophyll-a Remote Sensing Algorithms for an Optically Complex Estuary
[J].Remote Sensing of Environment ,2013 ,129 :75 -89 .doi: 10.1016/j.rse.2012.11.001 .
[77]
Sun Shaojie Tian Qingjiu Bao Ying et al Estimation and Evaluation of Chlorohyll-a Concentration in Taihu Lake in Spring
[J]. Remote Sensing of Information , 2012 , 27 (4 ):28 -33 .
孙绍杰 , 田庆久 , 包颖 , 等 春季太湖叶绿素 a 浓度的光谱估算与分析评价
[J]. 遥感信息 , 2012 , 27 (4 ): 28 -33 .
[78]
Ma Wandong Wu Chuanqing Yin Shoujing et al Chlorophyll-a Retrieval of Yantai Sishili Bay based on In-situ Spectral Characteristics
[J]. Environmental Monitoring in China , 2015 , 31 (4 ): 135 -140 .
[本文引用: 1]
马万栋 , 吴传庆 , 殷守敬 , 等 基于实测光谱的烟台四十里湾水体叶绿素 a 遥感反演
[J]. 中国环境监测 , 2015 , 31 (4 ): 135 -140 .
[本文引用: 1]
[79]
Werdell P J Bailey S W An Improved In-situ Bio-optical Data Set for Ocean Color Algorithm Development and Satellite Data Product Validation
[J]. Remote Sensing of Environment , 2005 , 98 (1 ): 122 -140 .
[本文引用: 1]
[80]
Reichstein M Camps-Valls G Stevens B et al Deep Learning and Process Understanding for Data-driven Earth System Science
[J]. Nature , 2019 , 566 (7743 ): 195 -204 .
[本文引用: 1]
Remote Sensing of Algal Blooms: An Overview with Case Studies
1
2012
... 水体中叶绿素a浓度是反映水体富营养化程度、监测藻华爆发情况的重要指标,对其进行有效监测,有助于防止水质进一步恶化[1 ,2 ] .传统方法一般在实验室内使用分光光度法测量叶绿素a浓度,需要耗费一定的时间和人力,且采样点有限,测量过程涉及水样采集、运输、过滤、研磨及提取等,这一系列限制因素和繁复的过程使得人们难以快速评估水体叶绿素a浓度水平[3 ,4 ] .相比之下,近几十年兴起的遥感手段能够在较短时间内反演出更大尺度范围的叶绿素a浓度,进而监测藻华爆发情况[5 ] ,对建设环境友好型社会具有重要意义. ...
An Assessment of Semi-analytical Models based on the Absorption Coefficient in Retrieving the Chlorophyll-a Concentration from a Reservoir
1
2019
... 水体中叶绿素a浓度是反映水体富营养化程度、监测藻华爆发情况的重要指标,对其进行有效监测,有助于防止水质进一步恶化[1 ,2 ] .传统方法一般在实验室内使用分光光度法测量叶绿素a浓度,需要耗费一定的时间和人力,且采样点有限,测量过程涉及水样采集、运输、过滤、研磨及提取等,这一系列限制因素和繁复的过程使得人们难以快速评估水体叶绿素a浓度水平[3 ,4 ] .相比之下,近几十年兴起的遥感手段能够在较短时间内反演出更大尺度范围的叶绿素a浓度,进而监测藻华爆发情况[5 ] ,对建设环境友好型社会具有重要意义. ...
Trophic State, Eutrophication and Nutrient Criteria in Streams
1
2007
... 水体中叶绿素a浓度是反映水体富营养化程度、监测藻华爆发情况的重要指标,对其进行有效监测,有助于防止水质进一步恶化[1 ,2 ] .传统方法一般在实验室内使用分光光度法测量叶绿素a浓度,需要耗费一定的时间和人力,且采样点有限,测量过程涉及水样采集、运输、过滤、研磨及提取等,这一系列限制因素和繁复的过程使得人们难以快速评估水体叶绿素a浓度水平[3 ,4 ] .相比之下,近几十年兴起的遥感手段能够在较短时间内反演出更大尺度范围的叶绿素a浓度,进而监测藻华爆发情况[5 ] ,对建设环境友好型社会具有重要意义. ...
A Semi-analytical Approach for Remote Sensing of Trophic State in Inland Waters: Bio-Optical Mechanism and Application
2
2019
... 水体中叶绿素a浓度是反映水体富营养化程度、监测藻华爆发情况的重要指标,对其进行有效监测,有助于防止水质进一步恶化[1 ,2 ] .传统方法一般在实验室内使用分光光度法测量叶绿素a浓度,需要耗费一定的时间和人力,且采样点有限,测量过程涉及水样采集、运输、过滤、研磨及提取等,这一系列限制因素和繁复的过程使得人们难以快速评估水体叶绿素a浓度水平[3 ,4 ] .相比之下,近几十年兴起的遥感手段能够在较短时间内反演出更大尺度范围的叶绿素a浓度,进而监测藻华爆发情况[5 ] ,对建设环境友好型社会具有重要意义. ...
... 早期利用遥感手段反演叶绿素a浓度主要围绕大洋等Ⅰ类水体展开,一般基于蓝绿波段比值,已取得较好的效果,但此类算法在光学活性组分作用机制复杂的Ⅱ类水体中应用受限[6 ] .因此,发展出了一系列更适用于Ⅱ类水体的算法,算法特征波段选取也有所改变,主要涉及叶绿素荧光峰以及其他近红外光和红光处的敏感波段.大部分反演算法虽在实验区表现较好,但通常受区域和季节因素限制大,难以广泛推广,同时,特征波段的位置和算法的具体参数值随水体变化而变化[4 ] ,少数适应性相对较好的算法也有待进一步验证. ...
Comparative Analysis of Four Models to Estimate Chlorophyll-a Concentration in Case-2 Waters Using Moderate Resolution Imaging Spectroradiometer(Modis) Imagery
1
2012
... 水体中叶绿素a浓度是反映水体富营养化程度、监测藻华爆发情况的重要指标,对其进行有效监测,有助于防止水质进一步恶化[1 ,2 ] .传统方法一般在实验室内使用分光光度法测量叶绿素a浓度,需要耗费一定的时间和人力,且采样点有限,测量过程涉及水样采集、运输、过滤、研磨及提取等,这一系列限制因素和繁复的过程使得人们难以快速评估水体叶绿素a浓度水平[3 ,4 ] .相比之下,近几十年兴起的遥感手段能够在较短时间内反演出更大尺度范围的叶绿素a浓度,进而监测藻华爆发情况[5 ] ,对建设环境友好型社会具有重要意义. ...
A Four-band Semi-analytical Model for Estimating Chlorophyll a in Highly Turbid Lakes: The Case of Taihu Lake, China
4
2009
... 早期利用遥感手段反演叶绿素a浓度主要围绕大洋等Ⅰ类水体展开,一般基于蓝绿波段比值,已取得较好的效果,但此类算法在光学活性组分作用机制复杂的Ⅱ类水体中应用受限[6 ] .因此,发展出了一系列更适用于Ⅱ类水体的算法,算法特征波段选取也有所改变,主要涉及叶绿素荧光峰以及其他近红外光和红光处的敏感波段.大部分反演算法虽在实验区表现较好,但通常受区域和季节因素限制大,难以广泛推广,同时,特征波段的位置和算法的具体参数值随水体变化而变化[4 ] ,少数适应性相对较好的算法也有待进一步验证. ...
... Le等[6 ] 在三波段算法的基础上,引入第四波段λ 4 R r s λ 3 R r s λ 4 - 1 - R r s λ 3 - 1 - 1 式(16) 和式(17) 所示.四波段法(4BDA)在水体高度浑浊时,可减少由于近红外波段处悬浮颗粒的吸收和后向散射以及纯水吸收对算法反演效果的影响.在太湖数据集中,四波段算法的反演效果优于三波段算法. ...
... 针对三波段法在高度浑浊水体中适用性较差,而四波段法对当前卫星传感器光谱分辨率要求较高的情况,Yang等[59 ] 提出了基于三波段法[55 ] 和四波段法[6 ] 改进后的三波段指数法,并在中国滇池和日本霞浦湖得到了较好的应用,精度相较于原始的三波段法有所提高.该方法基于四波段法的具体形式,但没有引入第四波段,而是重复使用第二波段以代替第四波段: ...
... MODIS:0.75
MERIS:3.6;MODIS:6.1 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665 MERIS 0.96 / [50 ] 3BDA 0.63~65.51 塔甘罗格湾、亚速海岸 708、665、753 MERIS 0.95 5.02 [51 ] 7.80~154.30 太湖 691.37、721.90、854.18 Hyperion 0.87 13.93 [54 ] 2.27~200.81 内布拉斯加州弗里蒙特湖区 band7、9、10 MERIS 0.95 3.30 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665、753 MERIS 0.96 / [50 ] 3~185 荷兰和中国多湖 704、672、776 >0.95 / [56 ] 3~185 多个河湖及河口 704、664、776 MERIS 0.96 / [57 ] 4BDA 4~158 太湖 662、693、740、705 0.97 9.74 [6 ] 进一步消除了悬浮颗粒吸收和后向散射的影响 对传感器光谱分辨率要求较高 4.4 优缺点分析 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
A Semianalytic Radiance Model of Ocean Color
1
1988
... 利用分析类方法对水体叶绿素a浓度进行反演,一般是基于水面遥感反射率R r s λ R r s λ a 和散射系数b 等的固有光学量(IOPs).水体辐射方程揭示了水体表观光学量和固有光学量之间的关系,经简化后得到生物光学模型,广泛应用于水色遥感领域[7 ] : ...
水体叶绿素 a 浓度遥感反演方法研究进展
1
2017
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
水体叶绿素 a 浓度遥感反演方法研究进展
1
2017
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
基于航空高光谱的囫囵淖尔水体浊度反演建模
1
2020
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
基于航空高光谱的囫囵淖尔水体浊度反演建模
1
2020
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
无人机高光谱遥感的水质参数反演与模型构建
1
2020
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
无人机高光谱遥感的水质参数反演与模型构建
1
2020
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
Evaluating the Portability of Satellite Derived Chlorophyll-a Algorithms for Temperate Inland Lakes Using Airborne Hyperspectral Imagery and Dense Surface Observations
6
2018
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... [11 ]等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... 荧光基线高度法最早由Gower[39 ] 提出,经抛物线拟合,计算出685 nm左右处荧光信号高于两侧连线(即基线)的高度,即荧光基线高度(FLH).后Gower等[40 ] 又使用MERIS波段计算FLH,如式(2) 所示,通过经验校准,寻找FLH与叶绿素a浓度之间的关系来对其浓度进行反演,此法的适用范围取决于水体内其他光学活跃组分的浓度,常用于近岸水体[41 ] ,在此类水体中,蓝绿波段比值法常因高浓度的黄色物质和悬浮物的存在导致算法的精度受到影响.Landsat 8的波段配置使其对叶绿素a的特征波峰不太敏感,导致很多反演算法在Landsat 8中的应用受到一定限制[11 ] .为此,Beck等[28 ] 结合前人开发的多种算法,提出了基于绿光处波峰的FLH Blue和FLH Violet两种算法,结果表明,绿光波峰的FLH Violet算法与Landsat 8融合相对较好(R 2 为0.546). ...
... 因不同传感器波段配置不同,有的能够很好地反映算法中所使用的光谱波段,有的传感器则无法涵盖某些叶绿素a特征波段,故不同的叶绿素a反演算法在不同的传感器中适应性有较大差异[11 ] .如果波段位置接近于叶绿素a的特征波长时,较窄的波段宽度有利于提高算法精度;而当波段位置距叶绿素a特征波长较远时,适当地增加波段宽度能够更好地获取叶绿素a特征信息[73 ] .例如,Landsat 8的波段配置使其无法检测到叶绿素a近红外波段的特征波峰,即使是使用改进后的FLH-Violet算法,算法反演效果也不太理想[11 , 28 ] ;MODIS的空间分辨率较低,故不适用于中小型湖泊叶绿素a浓度反演;MERIS经常应用于监测中大型水体水华爆发情况,但同样因为空间分辨率较低的原因,不适用于狭长型小水体;Hyperion波段较多较密,在光谱分辨率和空间分辨率上都具有优势,但重返周期长,时间分辨率较低.各类算法所用波段以及在不同卫星传感器的应用情况如表2 所示. ...
... [11 , 28 ];MODIS的空间分辨率较低,故不适用于中小型湖泊叶绿素a浓度反演;MERIS经常应用于监测中大型水体水华爆发情况,但同样因为空间分辨率较低的原因,不适用于狭长型小水体;Hyperion波段较多较密,在光谱分辨率和空间分辨率上都具有优势,但重返周期长,时间分辨率较低.各类算法所用波段以及在不同卫星传感器的应用情况如表2 所示. ...
... (2)城市河网、湖泊等内陆水体的水质监测一般对空间、光谱和时间分辨率要求较高.大部分传感器常因空间分辨率不足,导致样点有限[11 ] .而空间分辨率与光谱分辨率存在相互制约的关系,一味提高空间分辨率将影响传感器的光谱分辨率.从长远来看,进一步推动针对内陆水体水质监测的传感器研发是十分有必要的.就当下而言,随着无人机技术的发展,将机载高光谱传感器与低成本无人机技术相结合,也可为内陆水体水质监测提供另一种思路.高光谱传感器能够更充分地提取叶绿素a及其他水体光学活性组分的光学信号,无人机更适用于上述小型水域,且能够进一步覆盖偏远、缺乏实测数据的水域,细化并完善水体富营养化监测. ...
Retrieval of Chlorophyll and Suspended Matter from Imaging Spectrometry Data by Matrix Inversion
2
1998
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... 分析类算法基于水中光学辐射传输机理,具有明确的物理意义,主要利用水体组分与固有光学量、表观光学量和固有光学量之间的关系,来模拟水中的光场分布,进而反演水质参数[65 ] .分析类算法最早源于Gordon等[66 ] 在1975年提出的生物光学算法.后Hoogenboom等[12 ] 使用矩阵反演的方法,基于生物光学模型,对叶绿素和悬浮物浓度进行了反演.Maritorena等[67 ] 开发了出了针对大洋类水体的GSM模型(Garver–Siegel–Maritorena model),反演精度与传统OC4v4算法相近,且可运用到SeaWiFS影像上.Lee等[68 ] 则开发出了针对二类水体的QAA(Quasi-Analytical Algorithm)算法,其中555 nm处的吸收系数由经验推导而得,在更复杂水域中的适用性有待验证. ...
Simulation of Aviris Sensitivity for Detecting Chlorophyll over Coastal and Inland Waters
1
1998
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
Estimation of Chlorophyll-a Concentration in Turbid Productive Waters Using Airborne Hyperspectral Data
1
2012
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
Airborne Hyperspectral Remote Sensing to Assess Spatial Distribution of Water Quality Characteristics in Large Rivers: The Mississippi River and Its Tributaries in Minnesota
1
2013
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
Phytoplankton Pigment Concentrations in the Middle Atlantic Bight: Comparison of Ship Determinations and Czcs Estimates
1
1983
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
Monthly Variation of Pigment Concentrations and Seasonal Winds in China's Marginal Seas
1
2004
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
Seawifs Postlaunch Calibration and Validation Analyses,Part 3
4
2000
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... 二波段算法(2BDA)建立的是两个特定波段比值与叶绿素a浓度之间的关系,其中蓝绿波段比值法最早在大洋等一类水域中得到了广泛应用[48 ] .O’Reilly 等[18 ] 基于大量实测数据集,总结了一系列基于蓝绿波段比值反演叶绿素a浓度的标准算法OCx(Ocean Chlorophyll),叶绿素a的浓度和波段比值呈四阶多项式关系,算法涵盖多种卫星传感器,针对不同传感器的波段配置,选取相应的绿光波段作为分母,并直接选定或比较多个波段后选取波段反射率的最大值作为分子: ...
... Hu等[21 ] 提出了一种针对叶绿素a浓度低于0.25 mg/m3 的海洋(约占全球海洋的78%)经验反演算法,如式(18)所示.该算法建立了颜色指数(CI)和叶绿素a浓度之间的非线性回归关系.CI定义为绿光波段反射率和红蓝光之间线性反射率插值之间的差,相较于传统蓝绿波段比值法,新引入了红光波段,如式(19) 所示.该算法经全球实测数据及卫星遥感数据验证,在低浓度叶绿素a水体中,反演精度高于传统OCx算法[18 ] ,且受后向散射系数、仪器噪声和大气校正误差的影响较小,在光学组分各异的水体表现更加稳健. ...
... 比值法
OCx 0.008~90 全球多个大洋及海岸 根据不同传感器和算法,所选波段有所不同 SeaWiFs、CZCS、OTCS、MODIS、MERIS / / [18 ] 在大洋类水体中应用较为成熟 在复杂二类水体中表现较差 近红外-红光 ...
Interannual and Seasonal Variation of Chlorophyll-a off the Yellow River Mouth(1997–2012): Dominance of River Inputs and Coastal Dynamics
1
2016
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
Remote Estimation of Chl-a Concentration in Turbid Productive Waters — Return to a Simple Two-band Nir-red Model?
6
2011
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... 相较于蓝绿波段比值算法,红—近红外二波段算法在内陆和近岸水体中表现更好[50 ] .蓝绿波段比值算法在开阔大洋类水体中应用更广,而在内陆及近岸水体中,蓝绿波段的反射率还受到了CDOM和非藻类颗粒物的影响,故应考虑采用红光和近红外波段,在这两类波段中,吸收光谱受到的上述影响较小[20 ] . ...
... Gurlin等[20 ] 比较了多种叶绿素a反演算法在内陆和近岸水体中的表现.结果表明,形式相对简单的MERIS两波段算法反而在中低浓度叶绿素a(<25 mg/m3 )反演中表现最佳.该算法同样使用了MERIS的波段7和9,但建立的是叶绿素a浓度和波段比值的非线性二项式关系: ...
... 同样地,Gurlin等[20 ] 使用了MERIS的波段7、9和10的反射率,根据实测数据进行调整,发展出了三波段法的二项式形式: ...
... MODIS:0.75
MERIS:3.6;MODIS:6.1 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665 MERIS 0.96 / [50 ] 3BDA 0.63~65.51 塔甘罗格湾、亚速海岸 708、665、753 MERIS 0.95 5.02 [51 ] 7.80~154.30 太湖 691.37、721.90、854.18 Hyperion 0.87 13.93 [54 ] 2.27~200.81 内布拉斯加州弗里蒙特湖区 band7、9、10 MERIS 0.95 3.30 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665、753 MERIS 0.96 / [50 ] 3~185 荷兰和中国多湖 704、672、776 >0.95 / [56 ] 3~185 多个河湖及河口 704、664、776 MERIS 0.96 / [57 ] 4BDA 4~158 太湖 662、693、740、705 0.97 9.74 [6 ] 进一步消除了悬浮颗粒吸收和后向散射的影响 对传感器光谱分辨率要求较高 4.4 优缺点分析 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
... [
20 ]
2~100 内布拉斯加州弗里蒙特湖区 708、665、753 MERIS 0.96 / [50 ] 3~185 荷兰和中国多湖 704、672、776 >0.95 / [56 ] 3~185 多个河湖及河口 704、664、776 MERIS 0.96 / [57 ] 4BDA 4~158 太湖 662、693、740、705 0.97 9.74 [6 ] 进一步消除了悬浮颗粒吸收和后向散射的影响 对传感器光谱分辨率要求较高 4.4 优缺点分析 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
Chlorophyll Algorithms for Oligotrophic Oceans: A Novel Approach Based on Three‐band Reflectance Difference
3
2012
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... Hu等[21 ] 提出了一种针对叶绿素a浓度低于0.25 mg/m3 的海洋(约占全球海洋的78%)经验反演算法,如式(18)所示.该算法建立了颜色指数(CI)和叶绿素a浓度之间的非线性回归关系.CI定义为绿光波段反射率和红蓝光之间线性反射率插值之间的差,相较于传统蓝绿波段比值法,新引入了红光波段,如式(19) 所示.该算法经全球实测数据及卫星遥感数据验证,在低浓度叶绿素a水体中,反演精度高于传统OCx算法[18 ] ,且受后向散射系数、仪器噪声和大气校正误差的影响较小,在光学组分各异的水体表现更加稳健. ...
... 指数法
Hu指数 0.01~10 78%的全球海洋 443、555、670 SeaWiFs, MODIS 0.95 / [21 ] 受叶绿素a后向散射和非浮游植物吸收作用影响较小;受仪器噪声和大气校正误差影响较小 主要针对叶绿素a浓度小于0.25mg/m3 的海洋,在富营养水体中适用性有待验证 Yang指数 22.98~318.60 日本霞浦湖及中国滇池 band7、9、10 MERIS 日本:0.90 ...
A Soft-classification-based Chlorophyll-a Estimation Method Using Meris Data in the Highly Turbid and Eutrophic Taihu Lake
2
2019
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... 不同水体光学特征不同,而单一算法在遇到某些水体时往往反演精度不足,故发展出了基于水体分类的算法体系[22 , 62 ] .为进一步验证各类叶绿素a反演算法的普适性,深入分析各类水体的特征及其与不同算法的匹配程度,Neil等[63 ] 针对13种光学水体类型(OWTs),共列举了48种叶绿素a浓度反演算法,收集了源于185个内陆和沿岸水体的实测数据集,进而对比讨论了各类算法的反演精度和适用性.基于Spyrakos等[64 ] 提出的水体分类标准,Neil等[63 ] 开发了针对不同类型水体,同时考虑时空差异性的最佳算法参数组合,即动态变化算法(Dynamic Swit-ching Algorithm),而不是寻求单一参数配置的普适性算法.结果表明,该套算法将反演精度提高25%,相关系数达0.89,平均绝对误差仅为0.18 mg/m3 . ...
Medium Resolution Imaging Spectrometer(MERIS) Estimation of Chlorophyll-a Concentration in the Turbid Sediment-laden Waters of the Changjiang(Yangtze) Estuary
3
2010
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... 长江河口因水体悬浮物浓度(SSCs)较高,导致近红外波段处散射作用较强,给叶绿素a的反演带来了一定挑战,Shen等[23 ] 为了解决这一问题,提出了合成叶绿素a指数(SCI)算法.SCI算法引入了两个参数,H c h l H Δ 式(23) 和式(24) 所示,其中,H c h l
... 夏:0.91
春:0.86夏:2.87 [23 ] 适用于高悬浮物浓度水体 受大气校正误差影响大 智能 ...
Viirs-derived Chlorophyll-a Using the Ocean Color Index Method
1
2016
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
基于GOCI影像分类的太湖水体叶绿素 a 浓度日变化分析
1
2016
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
基于GOCI影像分类的太湖水体叶绿素 a 浓度日变化分析
1
2016
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
Tempo-spatial Dynamics of Water Quality and Its Response to River Flow in Estuary of Taihu Lake Based on GOCI Imagery
1
2017
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
A Modern Robust Approach to Remotely Estimate Chlorophyll in Coastal and Inland Zones
1
2018
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
Comparison of Satellite Reflectance Algorithms for Estimating Chlorophyll-a in a Temperate Reservoir Using Coincident Hyperspectral Aircraft Imagery and Dense Coincident Surface Observations
4
2016
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... 荧光基线高度法最早由Gower[39 ] 提出,经抛物线拟合,计算出685 nm左右处荧光信号高于两侧连线(即基线)的高度,即荧光基线高度(FLH).后Gower等[40 ] 又使用MERIS波段计算FLH,如式(2) 所示,通过经验校准,寻找FLH与叶绿素a浓度之间的关系来对其浓度进行反演,此法的适用范围取决于水体内其他光学活跃组分的浓度,常用于近岸水体[41 ] ,在此类水体中,蓝绿波段比值法常因高浓度的黄色物质和悬浮物的存在导致算法的精度受到影响.Landsat 8的波段配置使其对叶绿素a的特征波峰不太敏感,导致很多反演算法在Landsat 8中的应用受到一定限制[11 ] .为此,Beck等[28 ] 结合前人开发的多种算法,提出了基于绿光处波峰的FLH Blue和FLH Violet两种算法,结果表明,绿光波峰的FLH Violet算法与Landsat 8融合相对较好(R 2 为0.546). ...
... 因不同传感器波段配置不同,有的能够很好地反映算法中所使用的光谱波段,有的传感器则无法涵盖某些叶绿素a特征波段,故不同的叶绿素a反演算法在不同的传感器中适应性有较大差异[11 ] .如果波段位置接近于叶绿素a的特征波长时,较窄的波段宽度有利于提高算法精度;而当波段位置距叶绿素a特征波长较远时,适当地增加波段宽度能够更好地获取叶绿素a特征信息[73 ] .例如,Landsat 8的波段配置使其无法检测到叶绿素a近红外波段的特征波峰,即使是使用改进后的FLH-Violet算法,算法反演效果也不太理想[11 , 28 ] ;MODIS的空间分辨率较低,故不适用于中小型湖泊叶绿素a浓度反演;MERIS经常应用于监测中大型水体水华爆发情况,但同样因为空间分辨率较低的原因,不适用于狭长型小水体;Hyperion波段较多较密,在光谱分辨率和空间分辨率上都具有优势,但重返周期长,时间分辨率较低.各类算法所用波段以及在不同卫星传感器的应用情况如表2 所示. ...
... VIOLET:0.55
/ [28 ] NFH 0.10~350 多国河湖 560、675、700 / 0.93 / [45 ] FEA 1~224.28 珠江口 671.02~752.43 Hyperion / 0.22(log10) [30 ] 反射峰 ...
清河水库叶绿素 a 浓度反演模型研究
3
2016
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... 除人工神经网络算法外,支持向量机算法在解决非线性问题上也具有一定优势.杨国范等[29 ] 利用Landsat星载陆地成像仪数据,基于与叶绿素a浓度相关系数最高的波段或波段组合,比较了比值线性回归算法和最小二乘支持向量机算法(LS-SVM)在夏季清河水库中的反演效果,结果表明,相较于比值线性回归算法,LS-SVM算法能够有效提高R 2 (0.635~0.966),并减少均方根误差(4.83~2.67 mg/m3 )和平均相对误差(16.43%~7.21%),反演精度得到明显提高.而夏晓芸等[33 ] 在此基础上,采用了环境卫星多日共186组数据对大伙房水库的叶绿素a浓度进行反演,进一步验证了LS-SVM反演算法应用于内陆清洁水库的优越性. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
清河水库叶绿素 a 浓度反演模型研究
3
2016
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... 除人工神经网络算法外,支持向量机算法在解决非线性问题上也具有一定优势.杨国范等[29 ] 利用Landsat星载陆地成像仪数据,基于与叶绿素a浓度相关系数最高的波段或波段组合,比较了比值线性回归算法和最小二乘支持向量机算法(LS-SVM)在夏季清河水库中的反演效果,结果表明,相较于比值线性回归算法,LS-SVM算法能够有效提高R 2 (0.635~0.966),并减少均方根误差(4.83~2.67 mg/m3 )和平均相对误差(16.43%~7.21%),反演精度得到明显提高.而夏晓芸等[33 ] 在此基础上,采用了环境卫星多日共186组数据对大伙房水库的叶绿素a浓度进行反演,进一步验证了LS-SVM反演算法应用于内陆清洁水库的优越性. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
Retrieval of Chlorophyll a Concentration from a Fluorescence Enveloped Area Using Hyperspectral Data
3
2011
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... 由于叶绿素a荧光基线的位置随着叶绿素a浓度的增加存在向长波段偏移的趋势,故荧光峰的位置是不确定的.为弥补这一缺陷,Liu等[30 ] 提出荧光包络面积法(FEA),该方法采用包络线去除法(连续统去除)减少了背景值的影响,同时考虑了荧光基线的高度和位置来计算荧光包络面积,经高光谱实测数据验证,该方法在叶绿素a浓度较高的珠江口的表现较荧光基线法更佳,适用于高叶绿素a浓度,如爆发水华或赤潮的水体,在其他水体中的适用情况有待进一步验证. ...
... VIOLET:0.55
/ [28 ] NFH 0.10~350 多国河湖 560、675、700 / 0.93 / [45 ] FEA 1~224.28 珠江口 671.02~752.43 Hyperion / 0.22(log10) [30 ] 反射峰 ...
Sea Water Chlorophyll-a Estimation Using Hyperspectral Images and Supervised Artificial Neural Network
3
2014
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... Awad[31 ] 基于Hyperion星载高光谱图像,使用监督式前馈反向传播人工神经网络算法(ANN-BP)估算黎巴嫩海岸区叶绿素a浓度.结果表明,使用ANN-BP算法,基于两年数据,实验区的决定系数R 2 可高达0.89和0.96,且均方根误差RMSE仅为0.03和0.45 mg/m3 .因近岸海域水体成分复杂,数据多呈现非线性关系,而人工神经网络在解决非线性问题上具有优势,为此类水域叶绿素a及其他水体光学组分浓度的反演提供了新思路.国内学者朱云芳等[34 ] 应用高分一号卫星的WFV4影像数据,采用BP神经网络算法反演太湖叶绿素a浓度,相较于传统的波段比值算法,该算法可有效提高叶绿素a反演精度.此外,Ioannou等[61 ] 使用多层感知器神经网络算法(MLPNN),基于MODIS可见光波段的反射率来反演水体固有光学特性指标IOPs,并使用反演出的IOPs以及对应的反射率值作为输入集,来训练另一个神经网络算法,最终输出叶绿素a浓度.这一算法的准确性高于未使用IOPs作为输入变量的算法以及传统的MODIS OC3算法. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
Estimation of Chlorophyll-a Concentration in Coastal Waters with HJ-LA Hsi Data Using a Three-band Bio-optical Model and Validation
1
2014
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
大伙房水库叶绿素a浓度反演模型研究
3
2018
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... 除人工神经网络算法外,支持向量机算法在解决非线性问题上也具有一定优势.杨国范等[29 ] 利用Landsat星载陆地成像仪数据,基于与叶绿素a浓度相关系数最高的波段或波段组合,比较了比值线性回归算法和最小二乘支持向量机算法(LS-SVM)在夏季清河水库中的反演效果,结果表明,相较于比值线性回归算法,LS-SVM算法能够有效提高R 2 (0.635~0.966),并减少均方根误差(4.83~2.67 mg/m3 )和平均相对误差(16.43%~7.21%),反演精度得到明显提高.而夏晓芸等[33 ] 在此基础上,采用了环境卫星多日共186组数据对大伙房水库的叶绿素a浓度进行反演,进一步验证了LS-SVM反演算法应用于内陆清洁水库的优越性. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
大伙房水库叶绿素a浓度反演模型研究
3
2018
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... 除人工神经网络算法外,支持向量机算法在解决非线性问题上也具有一定优势.杨国范等[29 ] 利用Landsat星载陆地成像仪数据,基于与叶绿素a浓度相关系数最高的波段或波段组合,比较了比值线性回归算法和最小二乘支持向量机算法(LS-SVM)在夏季清河水库中的反演效果,结果表明,相较于比值线性回归算法,LS-SVM算法能够有效提高R 2 (0.635~0.966),并减少均方根误差(4.83~2.67 mg/m3 )和平均相对误差(16.43%~7.21%),反演精度得到明显提高.而夏晓芸等[33 ] 在此基础上,采用了环境卫星多日共186组数据对大伙房水库的叶绿素a浓度进行反演,进一步验证了LS-SVM反演算法应用于内陆清洁水库的优越性. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
基于 GF-1 WFV 影像和BP神经网络的太湖叶绿素 a 反演
3
2017
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... Awad[31 ] 基于Hyperion星载高光谱图像,使用监督式前馈反向传播人工神经网络算法(ANN-BP)估算黎巴嫩海岸区叶绿素a浓度.结果表明,使用ANN-BP算法,基于两年数据,实验区的决定系数R 2 可高达0.89和0.96,且均方根误差RMSE仅为0.03和0.45 mg/m3 .因近岸海域水体成分复杂,数据多呈现非线性关系,而人工神经网络在解决非线性问题上具有优势,为此类水域叶绿素a及其他水体光学组分浓度的反演提供了新思路.国内学者朱云芳等[34 ] 应用高分一号卫星的WFV4影像数据,采用BP神经网络算法反演太湖叶绿素a浓度,相较于传统的波段比值算法,该算法可有效提高叶绿素a反演精度.此外,Ioannou等[61 ] 使用多层感知器神经网络算法(MLPNN),基于MODIS可见光波段的反射率来反演水体固有光学特性指标IOPs,并使用反演出的IOPs以及对应的反射率值作为输入集,来训练另一个神经网络算法,最终输出叶绿素a浓度.这一算法的准确性高于未使用IOPs作为输入变量的算法以及传统的MODIS OC3算法. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
基于 GF-1 WFV 影像和BP神经网络的太湖叶绿素 a 反演
3
2017
... 水体叶绿素a浓度遥感反演数据源可以分为两大类,一类是星载遥感数据源,另一类非星载遥感数据源,其中非星载数据又可进一步分为机载遥感数据和地面实测数据[8 ] ,机载平台则包括有人机[9 ] 和无人机[10 ] .国内外学者基于非星载遥感数据在水体叶绿素a浓度反演方面做了大量研究,包括利用机载传感器CASI[11 -12 ] 、AVIRIS[13 ] 、AISA[14 -15 ] 等获取机载遥感数据,以及利用ASD公司(Analytical Spectral Devices, Inc.)生产的野外光谱分析仪[11 ] 等获取地面实测数据.利用星载传感器反演水体叶绿素a浓度水平始于1978年发射的海洋水色扫描仪CZCS[16 -17 ] ,后续发展出了宽视场水色扫描仪SeaWiFS[18 -19 ] ,以上两代水色卫星多与蓝绿波段比值法结合;而随着第三代水色卫星中分辨率成像光谱仪MODIS[20 -21 ] 和MERIS[22 -23 ] 的发射,发展出了荧光遥感产品;此外,可见光红外成像辐射仪VIIRS[24 ] 、海洋彩色成像仪GOCI[25 -26 ] 、近岸海域高光谱成像仪HICO[27 ] 、陆地成像仪OLI[28 -29 ] 以及高光谱成像仪Hyperion[30 -31 ] 也被应用于叶绿素a浓度反演中;而我国发射的环境一号卫星上搭载的超光谱成像仪HSI[32 ] 和CCD相机[33 ] 以及高分一号卫星上搭载的WFV[34 ] 等也均在此领域成功运用.各星载传感器的分辨率如表1 所示. ...
... Awad[31 ] 基于Hyperion星载高光谱图像,使用监督式前馈反向传播人工神经网络算法(ANN-BP)估算黎巴嫩海岸区叶绿素a浓度.结果表明,使用ANN-BP算法,基于两年数据,实验区的决定系数R 2 可高达0.89和0.96,且均方根误差RMSE仅为0.03和0.45 mg/m3 .因近岸海域水体成分复杂,数据多呈现非线性关系,而人工神经网络在解决非线性问题上具有优势,为此类水域叶绿素a及其他水体光学组分浓度的反演提供了新思路.国内学者朱云芳等[34 ] 应用高分一号卫星的WFV4影像数据,采用BP神经网络算法反演太湖叶绿素a浓度,相较于传统的波段比值算法,该算法可有效提高叶绿素a反演精度.此外,Ioannou等[61 ] 使用多层感知器神经网络算法(MLPNN),基于MODIS可见光波段的反射率来反演水体固有光学特性指标IOPs,并使用反演出的IOPs以及对应的反射率值作为输入集,来训练另一个神经网络算法,最终输出叶绿素a浓度.这一算法的准确性高于未使用IOPs作为输入变量的算法以及传统的MODIS OC3算法. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
Remotely Assessing and Monitoring Coastal and Inland Water Quality in China: Progress,Challenges and Outlook
1
2020
... 在上述星载遥感数据源中,CZCS、SeaWiFS、MODIS、MERIS和VIIRS主要用于海洋叶绿素a浓度反演,近期MODIS和MERIS在沿岸及内陆水体叶绿素a反演取得了一定的进展,为陆地生态系统设计的Landsat 8 OLI也被用于内陆水体叶绿素a浓度反演.为及时监测有害藻华的爆发,星载传感器需要有较高的时间分辨率和光谱分辨率.然而,星载传感器的空间分辨率和光谱分辨率存在相互制约的关系,给内陆水体叶绿素a反演带来了挑战.内陆小型水体对传感器空间分辨率要求高,但高空间分辨率的传感器通常瞬时视场角(IFOV)小,为满足成像信噪比要求,就需要增加光谱带宽,最终导致传感器光谱分辨率降低[35 ] .如表1 所示,时间分辨率和光谱分辨率较高的传感器,空间分辨率较低,如MODIS,VIIRS,GOCI等;而其中光谱分辨率和空间分辨率都较高的Hyperion的时间分辨率较低,为16 d.由此可见,针对不同类型的水体,选取合适的星载数据源,并进一步寻求分辨率之间的平衡与优化十分重要. ...
河口及近岸海域水体叶绿素浓度反演方法综述
1
2017
... 叶绿素a的荧光信号是其区别于黄色物质和悬浮物的主要特征之一[36 ] .1977年Neville与Gower[37 ] 使用机载光谱仪,确定了叶绿素a荧光信号出现在685 nm处左右,并指出基于荧光信号反演叶绿素a浓度的可能性.后续学者发展出了一系列基于叶绿素a荧光信号的反演方法,包括荧光基线高度法及其变体(FLH、FLH Blue、FLH Violet)、归一化荧光高度法(NFH)、荧光包络面积法(FEA)等.除此之外,也有学者基于荧光峰算法的算法结构,提出了改进后的反射峰算法(MPH、MCI),反射峰指的是叶绿素a在红光—近红外波段的反射率曲线波峰,不仅包含了荧光峰信号,还包含了藻类细胞散射信号[38 ] . ...
河口及近岸海域水体叶绿素浓度反演方法综述
1
2017
... 叶绿素a的荧光信号是其区别于黄色物质和悬浮物的主要特征之一[36 ] .1977年Neville与Gower[37 ] 使用机载光谱仪,确定了叶绿素a荧光信号出现在685 nm处左右,并指出基于荧光信号反演叶绿素a浓度的可能性.后续学者发展出了一系列基于叶绿素a荧光信号的反演方法,包括荧光基线高度法及其变体(FLH、FLH Blue、FLH Violet)、归一化荧光高度法(NFH)、荧光包络面积法(FEA)等.除此之外,也有学者基于荧光峰算法的算法结构,提出了改进后的反射峰算法(MPH、MCI),反射峰指的是叶绿素a在红光—近红外波段的反射率曲线波峰,不仅包含了荧光峰信号,还包含了藻类细胞散射信号[38 ] . ...
Passive Remote Sensing of Phytoplankton Via Chlorophyll Α Fluorescence
1
1977
... 叶绿素a的荧光信号是其区别于黄色物质和悬浮物的主要特征之一[36 ] .1977年Neville与Gower[37 ] 使用机载光谱仪,确定了叶绿素a荧光信号出现在685 nm处左右,并指出基于荧光信号反演叶绿素a浓度的可能性.后续学者发展出了一系列基于叶绿素a荧光信号的反演方法,包括荧光基线高度法及其变体(FLH、FLH Blue、FLH Violet)、归一化荧光高度法(NFH)、荧光包络面积法(FEA)等.除此之外,也有学者基于荧光峰算法的算法结构,提出了改进后的反射峰算法(MPH、MCI),反射峰指的是叶绿素a在红光—近红外波段的反射率曲线波峰,不仅包含了荧光峰信号,还包含了藻类细胞散射信号[38 ] . ...
Fluorescence Component in the Reflectance Spectra from Coastal Waters, Dependence on Water Composition
1
2007
... 叶绿素a的荧光信号是其区别于黄色物质和悬浮物的主要特征之一[36 ] .1977年Neville与Gower[37 ] 使用机载光谱仪,确定了叶绿素a荧光信号出现在685 nm处左右,并指出基于荧光信号反演叶绿素a浓度的可能性.后续学者发展出了一系列基于叶绿素a荧光信号的反演方法,包括荧光基线高度法及其变体(FLH、FLH Blue、FLH Violet)、归一化荧光高度法(NFH)、荧光包络面积法(FEA)等.除此之外,也有学者基于荧光峰算法的算法结构,提出了改进后的反射峰算法(MPH、MCI),反射峰指的是叶绿素a在红光—近红外波段的反射率曲线波峰,不仅包含了荧光峰信号,还包含了藻类细胞散射信号[38 ] . ...
Observations of In-situ Fluorescence of Chlorophyll- a in Saanich Inlet
1
1980
... 荧光基线高度法最早由Gower[39 ] 提出,经抛物线拟合,计算出685 nm左右处荧光信号高于两侧连线(即基线)的高度,即荧光基线高度(FLH).后Gower等[40 ] 又使用MERIS波段计算FLH,如式(2) 所示,通过经验校准,寻找FLH与叶绿素a浓度之间的关系来对其浓度进行反演,此法的适用范围取决于水体内其他光学活跃组分的浓度,常用于近岸水体[41 ] ,在此类水体中,蓝绿波段比值法常因高浓度的黄色物质和悬浮物的存在导致算法的精度受到影响.Landsat 8的波段配置使其对叶绿素a的特征波峰不太敏感,导致很多反演算法在Landsat 8中的应用受到一定限制[11 ] .为此,Beck等[28 ] 结合前人开发的多种算法,提出了基于绿光处波峰的FLH Blue和FLH Violet两种算法,结果表明,绿光波峰的FLH Violet算法与Landsat 8融合相对较好(R 2 为0.546). ...
Interpretation of the 685 nm Peak in Water-leaving Radiance Spectra in Terms of Fluorescence, Absorption and Scattering, and Its Observation by Meris
2
1999
... 荧光基线高度法最早由Gower[39 ] 提出,经抛物线拟合,计算出685 nm左右处荧光信号高于两侧连线(即基线)的高度,即荧光基线高度(FLH).后Gower等[40 ] 又使用MERIS波段计算FLH,如式(2) 所示,通过经验校准,寻找FLH与叶绿素a浓度之间的关系来对其浓度进行反演,此法的适用范围取决于水体内其他光学活跃组分的浓度,常用于近岸水体[41 ] ,在此类水体中,蓝绿波段比值法常因高浓度的黄色物质和悬浮物的存在导致算法的精度受到影响.Landsat 8的波段配置使其对叶绿素a的特征波峰不太敏感,导致很多反演算法在Landsat 8中的应用受到一定限制[11 ] .为此,Beck等[28 ] 结合前人开发的多种算法,提出了基于绿光处波峰的FLH Blue和FLH Violet两种算法,结果表明,绿光波峰的FLH Violet算法与Landsat 8融合相对较好(R 2 为0.546). ...
... 算法
FLH 1~15.30 温哥华岛西海岸、波罗的海 620、665、681.25、705、754 MERIS 0.70~0.90 / [40 ] 在很大程度上排除CDOM和水底的干扰;对大气校正误差不敏感 荧光峰的位置受到叶绿素a及其他物质浓度的影响,其中FEA算法受影响较小 FLH 0.40~4 佛罗里达西南部沿海水域 MODIS FLH 667、678、748 MODIS 0.85 / [41 ] FLH BLUE/FLH ...
Red Tide Detection and Tracing Using MODIS Fluorescence Data: A Regional Example in SW Florida Coastal Waters
2
2005
... 荧光基线高度法最早由Gower[39 ] 提出,经抛物线拟合,计算出685 nm左右处荧光信号高于两侧连线(即基线)的高度,即荧光基线高度(FLH).后Gower等[40 ] 又使用MERIS波段计算FLH,如式(2) 所示,通过经验校准,寻找FLH与叶绿素a浓度之间的关系来对其浓度进行反演,此法的适用范围取决于水体内其他光学活跃组分的浓度,常用于近岸水体[41 ] ,在此类水体中,蓝绿波段比值法常因高浓度的黄色物质和悬浮物的存在导致算法的精度受到影响.Landsat 8的波段配置使其对叶绿素a的特征波峰不太敏感,导致很多反演算法在Landsat 8中的应用受到一定限制[11 ] .为此,Beck等[28 ] 结合前人开发的多种算法,提出了基于绿光处波峰的FLH Blue和FLH Violet两种算法,结果表明,绿光波峰的FLH Violet算法与Landsat 8融合相对较好(R 2 为0.546). ...
... 算法
FLH 1~15.30 温哥华岛西海岸、波罗的海 620、665、681.25、705、754 MERIS 0.70~0.90 / [40 ] 在很大程度上排除CDOM和水底的干扰;对大气校正误差不敏感 荧光峰的位置受到叶绿素a及其他物质浓度的影响,其中FEA算法受影响较小 FLH 0.40~4 佛罗里达西南部沿海水域 MODIS FLH 667、678、748 MODIS 0.85 / [41 ] FLH BLUE/FLH ...
On the Reflectance Spectrum of Algae in Water: The Nature of the Peak at 700 nm and Its Shift with Varying Algal Concentration
1
1986
... Vos等[42 ] 指出叶绿素a在700 nm附近的荧光峰位置及高度,常随叶绿素a浓度的变化而变化.定量研究叶绿素a浓度变化与荧光峰高度之间关系的方法除了上文提到的荧光基线高度法,还有归一化荧光高度法[43 -44 ] .归一化荧光高度法(NFH)的基本原理是将荧光峰处局部反射率最大值R m a x R 560 R 675 式(3) 所示,Gitelson[45 ] 使用归一化荧光高度法,对多个富营养化水体中叶绿素a浓度进行反演,相关系数达0.93以上. ...
表征赤潮水体太阳激发的叶绿素荧光高度的波段优化-归一化荧光高度法
1
2005
... Vos等[42 ] 指出叶绿素a在700 nm附近的荧光峰位置及高度,常随叶绿素a浓度的变化而变化.定量研究叶绿素a浓度变化与荧光峰高度之间关系的方法除了上文提到的荧光基线高度法,还有归一化荧光高度法[43 -44 ] .归一化荧光高度法(NFH)的基本原理是将荧光峰处局部反射率最大值R m a x R 560 R 675 式(3) 所示,Gitelson[45 ] 使用归一化荧光高度法,对多个富营养化水体中叶绿素a浓度进行反演,相关系数达0.93以上. ...
表征赤潮水体太阳激发的叶绿素荧光高度的波段优化-归一化荧光高度法
1
2005
... Vos等[42 ] 指出叶绿素a在700 nm附近的荧光峰位置及高度,常随叶绿素a浓度的变化而变化.定量研究叶绿素a浓度变化与荧光峰高度之间关系的方法除了上文提到的荧光基线高度法,还有归一化荧光高度法[43 -44 ] .归一化荧光高度法(NFH)的基本原理是将荧光峰处局部反射率最大值R m a x R 560 R 675 式(3) 所示,Gitelson[45 ] 使用归一化荧光高度法,对多个富营养化水体中叶绿素a浓度进行反演,相关系数达0.93以上. ...
叶绿素 a 荧光遥感研究进展
2
2007
... Vos等[42 ] 指出叶绿素a在700 nm附近的荧光峰位置及高度,常随叶绿素a浓度的变化而变化.定量研究叶绿素a浓度变化与荧光峰高度之间关系的方法除了上文提到的荧光基线高度法,还有归一化荧光高度法[43 -44 ] .归一化荧光高度法(NFH)的基本原理是将荧光峰处局部反射率最大值R m a x R 560 R 675 式(3) 所示,Gitelson[45 ] 使用归一化荧光高度法,对多个富营养化水体中叶绿素a浓度进行反演,相关系数达0.93以上. ...
... 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
叶绿素 a 荧光遥感研究进展
2
2007
... Vos等[42 ] 指出叶绿素a在700 nm附近的荧光峰位置及高度,常随叶绿素a浓度的变化而变化.定量研究叶绿素a浓度变化与荧光峰高度之间关系的方法除了上文提到的荧光基线高度法,还有归一化荧光高度法[43 -44 ] .归一化荧光高度法(NFH)的基本原理是将荧光峰处局部反射率最大值R m a x R 560 R 675 式(3) 所示,Gitelson[45 ] 使用归一化荧光高度法,对多个富营养化水体中叶绿素a浓度进行反演,相关系数达0.93以上. ...
... 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
The Peak near 700 nm on Radiance Spectra of Algae and Water-relationships of Its Magnitude and Position with Chlorophyll Concentration
2
1992
... Vos等[42 ] 指出叶绿素a在700 nm附近的荧光峰位置及高度,常随叶绿素a浓度的变化而变化.定量研究叶绿素a浓度变化与荧光峰高度之间关系的方法除了上文提到的荧光基线高度法,还有归一化荧光高度法[43 -44 ] .归一化荧光高度法(NFH)的基本原理是将荧光峰处局部反射率最大值R m a x R 560 R 675 式(3) 所示,Gitelson[45 ] 使用归一化荧光高度法,对多个富营养化水体中叶绿素a浓度进行反演,相关系数达0.93以上. ...
... VIOLET:0.55
/ [28 ] NFH 0.10~350 多国河湖 560、675、700 / 0.93 / [45 ] FEA 1~224.28 珠江口 671.02~752.43 Hyperion / 0.22(log10) [30 ] 反射峰 ...
An Algorithm for Detecting Trophic Status(Chlorophyll-a), Cyanobacterial-Dominance, Surface Scums and Floating Vegetation in Inland and Coastal Waters
3
2012
... 反射峰高度(MPH)最初由Matthews等[46 ] 提出,其基本思想类似于荧光基线高度,但峰值位置不是固定的,而是对比MERIS近红外、红光波段681、709和753 nm处的反射率,取Bottom of Rayleigh反射率最大值;且基线基于的波段位置也不是708和665 nm,而是885和664 nm,如式(4) 所示.结果表明,基于这两个波段的反演结果更加稳健.针对不同类型的水体,Matthews等[46 ] 建立了一种基于MPH的非线性四阶方程,如式(5) 所示,该方法有效地简化了大气校正过程,适用于由浮游植物主导的内陆及近岸水体. ...
... [46 ]建立了一种基于MPH的非线性四阶方程,如式(5) 所示,该方法有效地简化了大气校正过程,适用于由浮游植物主导的内陆及近岸水体. ...
... 算法
MPH 0.50~350 南非西海岸、湖泊及水库 max(681、709、753);885、664 MERIS 0.71 / [46 ] 在富营养化、表面水华爆发的水体中表现较好;对大气校正误差不敏感 反射峰位置受叶绿素a浓度影响;MCI在贫营养水体中不太适用且受沉积物散射影响较大 MCI 10~300 安大略湖、伍兹湖、伊利湖 681、709、753 MERIS 0.70~0.94 / [47 ] 蓝绿 ...
The Meris Maximum Chlorophyll Index; Its Merits and Limitations for Inland Water Algal Bloom Monitoring
2
2013
... 反射峰指数MCI是一个类似于MPH的指数,定义为709 nm处的离水反射率最大值,相对两侧波段基线的差,如式(6) 所示.Binding等[47 ] 基于北美内陆多个光学组分各异的水体数据,指出在中低浓度叶绿素a水体中,近红外波段的峰值由荧光信号主导,但随着水体富营养化程度增加,荧光信号对近红外波段峰值的贡献减少,故包含荧光峰信号和藻类细胞散射信号的反射峰算法更适用于表面藻华爆发的富营养化水体. ...
... 算法
MPH 0.50~350 南非西海岸、湖泊及水库 max(681、709、753);885、664 MERIS 0.71 / [46 ] 在富营养化、表面水华爆发的水体中表现较好;对大气校正误差不敏感 反射峰位置受叶绿素a浓度影响;MCI在贫营养水体中不太适用且受沉积物散射影响较大 MCI 10~300 安大略湖、伍兹湖、伊利湖 681、709、753 MERIS 0.70~0.94 / [47 ] 蓝绿 ...
Review of Constituent Retrieval in Optically Deep and Complex Waters from Satellite Imagery
1
2012
... 二波段算法(2BDA)建立的是两个特定波段比值与叶绿素a浓度之间的关系,其中蓝绿波段比值法最早在大洋等一类水域中得到了广泛应用[48 ] .O’Reilly 等[18 ] 基于大量实测数据集,总结了一系列基于蓝绿波段比值反演叶绿素a浓度的标准算法OCx(Ocean Chlorophyll),叶绿素a的浓度和波段比值呈四阶多项式关系,算法涵盖多种卫星传感器,针对不同传感器的波段配置,选取相应的绿光波段作为分母,并直接选定或比较多个波段后选取波段反射率的最大值作为分子: ...
Chlorophyll Algorithms for Ocean Color Sensors-Oc4, Oc5 & Oc6
1
2019
... 后O'Reilly和Werdell[49 ] 进一步更新了OCx算法,发展出OC5和OC6算法.就SeaWiFS而言,在比较选取分子处反射率时,额外考虑了紫光412 nm处的反射率.OC5算法的分母保持不变,而OC6算法的分母取的是555 nm和670 nm处反射率的均值.除此之外,该套算法在近期或即将发射的卫星传感器上的应用情况也得到了验证. ...
Algorithms for Remote Estimation of Chlorophyll-a in Coastal and Inland Waters Using Red and near Infrared Bands
5
2010
... 相较于蓝绿波段比值算法,红—近红外二波段算法在内陆和近岸水体中表现更好[50 ] .蓝绿波段比值算法在开阔大洋类水体中应用更广,而在内陆及近岸水体中,蓝绿波段的反射率还受到了CDOM和非藻类颗粒物的影响,故应考虑采用红光和近红外波段,在这两类波段中,吸收光谱受到的上述影响较小[20 ] . ...
... Gilerson等[50 ] 在Moses等[51 ] 的基础上,使用实测及模拟数据集,进一步分析了反射光谱和水体固有光学量之间的关系,改进了算法形式,并比较了MERIS二、三波段算法和MODIS二波段算法对光学水质参数变化的敏感程度.结果显示,相较于MODIS二波段算法,MERIS二、三波段算法主要受到水体和浮游植物吸收项的影响,对后向散射项和CDOM吸收项比较不敏感,故在低浓度叶绿素水体中的适用性更佳.其中,MERIS二波段半分析算法经简化后,如式(9) 所示: ...
... 相较于3.2.1节中提及的MERIS二波段半分析算法,Gilerson等[50 ] 指出,引入753 nm处反射率的MEIRIS三波段法,受到后向散射项和CDOM吸收项的影响更小: ...
... MODIS:0.75
MERIS:3.6;MODIS:6.1 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665 MERIS 0.96 / [50 ] 3BDA 0.63~65.51 塔甘罗格湾、亚速海岸 708、665、753 MERIS 0.95 5.02 [51 ] 7.80~154.30 太湖 691.37、721.90、854.18 Hyperion 0.87 13.93 [54 ] 2.27~200.81 内布拉斯加州弗里蒙特湖区 band7、9、10 MERIS 0.95 3.30 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665、753 MERIS 0.96 / [50 ] 3~185 荷兰和中国多湖 704、672、776 >0.95 / [56 ] 3~185 多个河湖及河口 704、664、776 MERIS 0.96 / [57 ] 4BDA 4~158 太湖 662、693、740、705 0.97 9.74 [6 ] 进一步消除了悬浮颗粒吸收和后向散射的影响 对传感器光谱分辨率要求较高 4.4 优缺点分析 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
... [
50 ]
3~185 荷兰和中国多湖 704、672、776 >0.95 / [56 ] 3~185 多个河湖及河口 704、664、776 MERIS 0.96 / [57 ] 4BDA 4~158 太湖 662、693、740、705 0.97 9.74 [6 ] 进一步消除了悬浮颗粒吸收和后向散射的影响 对传感器光谱分辨率要求较高 4.4 优缺点分析 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
Satellite Estimation of Chlorophyll-a Concentration Using the Red and Nir Bands of Meris—the Azov Sea Case Study
5
2009
... Moses等[51 ] 将红—近红外二波段算法与MERIS数据相结合,考虑到大气校正的影响,分别选取了708 nm和665 nm处的反射率,建立叶绿素a浓度与MERIS波段7和9反射率比值之间的线性关系,其中斜率和截距由实测数据经验推导得出,算法在其他水域的适用性还有待验证: ...
... Gilerson等[50 ] 在Moses等[51 ] 的基础上,使用实测及模拟数据集,进一步分析了反射光谱和水体固有光学量之间的关系,改进了算法形式,并比较了MERIS二、三波段算法和MODIS二波段算法对光学水质参数变化的敏感程度.结果显示,相较于MODIS二波段算法,MERIS二、三波段算法主要受到水体和浮游植物吸收项的影响,对后向散射项和CDOM吸收项比较不敏感,故在低浓度叶绿素水体中的适用性更佳.其中,MERIS二波段半分析算法经简化后,如式(9) 所示: ...
... 后三波段法由Moses等[51 ] 和杜聪等[54 ] 进一步发展,分别应用于MERIS和Hyperion星载传感器上.相比于二波段法,三波段法将753 nm处的反射率也纳入算法中,该波段的反射率主要受悬浮颗粒物后向散射的影响.三波段法的优势在于,第三波段的引入理论上消除了其他光学活性组分,即SPM(浮游粒子状物质)和CDOM(有色可溶性有机物),对叶绿素a浓度反演的影响. ...
... 比值法
2BDA 0.63~65.51 塔甘罗格湾、亚速海岸 708、665 MERIS 0.97 3.65 [51 ] 考虑了悬浮物和黄色物质的影响,在二类水体中表现较佳 ...
... MODIS:0.75
MERIS:3.6;MODIS:6.1 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665 MERIS 0.96 / [50 ] 3BDA 0.63~65.51 塔甘罗格湾、亚速海岸 708、665、753 MERIS 0.95 5.02 [51 ] 7.80~154.30 太湖 691.37、721.90、854.18 Hyperion 0.87 13.93 [54 ] 2.27~200.81 内布拉斯加州弗里蒙特湖区 band7、9、10 MERIS 0.95 3.30 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665、753 MERIS 0.96 / [50 ] 3~185 荷兰和中国多湖 704、672、776 >0.95 / [56 ] 3~185 多个河湖及河口 704、664、776 MERIS 0.96 / [57 ] 4BDA 4~158 太湖 662、693、740、705 0.97 9.74 [6 ] 进一步消除了悬浮颗粒吸收和后向散射的影响 对传感器光谱分辨率要求较高 4.4 优缺点分析 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
Towards a Unified Approach for Remote Estimation of Chlorophyll-a in Both Terrestrial Vegetation and Turbid Productive Waters
1
2003
... Dall'Olmo等[52 ] 将陆地植被叶片叶绿素a含量的概念性反演算法[53 ] 调整后,应用到了水体叶绿素a浓度反演,即三波段法(3BDA)的原型: ...
Relationships between Leaf Chlorophyll Content and Spectral Reflectance and Algorithms for Non-destructive Chlorophyll Assessment in Higher Plant Leaves
1
2003
... Dall'Olmo等[52 ] 将陆地植被叶片叶绿素a含量的概念性反演算法[53 ] 调整后,应用到了水体叶绿素a浓度反演,即三波段法(3BDA)的原型: ...
利用 Hyperion 高光谱数据的三波段法反演太湖叶绿素 a 浓度
2
2009
... 后三波段法由Moses等[51 ] 和杜聪等[54 ] 进一步发展,分别应用于MERIS和Hyperion星载传感器上.相比于二波段法,三波段法将753 nm处的反射率也纳入算法中,该波段的反射率主要受悬浮颗粒物后向散射的影响.三波段法的优势在于,第三波段的引入理论上消除了其他光学活性组分,即SPM(浮游粒子状物质)和CDOM(有色可溶性有机物),对叶绿素a浓度反演的影响. ...
... MODIS:0.75
MERIS:3.6;MODIS:6.1 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665 MERIS 0.96 / [50 ] 3BDA 0.63~65.51 塔甘罗格湾、亚速海岸 708、665、753 MERIS 0.95 5.02 [51 ] 7.80~154.30 太湖 691.37、721.90、854.18 Hyperion 0.87 13.93 [54 ] 2.27~200.81 内布拉斯加州弗里蒙特湖区 band7、9、10 MERIS 0.95 3.30 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665、753 MERIS 0.96 / [50 ] 3~185 荷兰和中国多湖 704、672、776 >0.95 / [56 ] 3~185 多个河湖及河口 704、664、776 MERIS 0.96 / [57 ] 4BDA 4~158 太湖 662、693、740、705 0.97 9.74 [6 ] 进一步消除了悬浮颗粒吸收和后向散射的影响 对传感器光谱分辨率要求较高 4.4 优缺点分析 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
利用 Hyperion 高光谱数据的三波段法反演太湖叶绿素 a 浓度
2
2009
... 后三波段法由Moses等[51 ] 和杜聪等[54 ] 进一步发展,分别应用于MERIS和Hyperion星载传感器上.相比于二波段法,三波段法将753 nm处的反射率也纳入算法中,该波段的反射率主要受悬浮颗粒物后向散射的影响.三波段法的优势在于,第三波段的引入理论上消除了其他光学活性组分,即SPM(浮游粒子状物质)和CDOM(有色可溶性有机物),对叶绿素a浓度反演的影响. ...
... MODIS:0.75
MERIS:3.6;MODIS:6.1 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665 MERIS 0.96 / [50 ] 3BDA 0.63~65.51 塔甘罗格湾、亚速海岸 708、665、753 MERIS 0.95 5.02 [51 ] 7.80~154.30 太湖 691.37、721.90、854.18 Hyperion 0.87 13.93 [54 ] 2.27~200.81 内布拉斯加州弗里蒙特湖区 band7、9、10 MERIS 0.95 3.30 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665、753 MERIS 0.96 / [50 ] 3~185 荷兰和中国多湖 704、672、776 >0.95 / [56 ] 3~185 多个河湖及河口 704、664、776 MERIS 0.96 / [57 ] 4BDA 4~158 太湖 662、693、740、705 0.97 9.74 [6 ] 进一步消除了悬浮颗粒吸收和后向散射的影响 对传感器光谱分辨率要求较高 4.4 优缺点分析 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
A Simple Semi-analytical Model for Remote Estimation of Chlorophyll-a in Turbid Waters: Validation
2
2008
... 为消除非色素悬浮物、CDOM和后向散射的影响,三波段的选取需满足如下条件[55 ] :①λ1 应对叶绿素a吸收最敏感,λ2 应对叶绿素a吸收最不敏感(achla (λ2 )<<achla (λ1 ));②在第二波段上,非色素悬浮物(tripton)和CDOM的吸收应近似于第一波段(atripton (λ1 ) ~ atripton (λ2 )且aCDOM (λ1 ) ~ aCDOM (λ2 ));③第三波段处受到叶绿素a、非色素悬浮物和有色可溶性有机物的影响应该最小;第三波段的后向散射系数应与第一、第二波段的值接近(aw (λ3 )>>achla (λ3 )+atr (λ3 )+acdom (λ3 );bb (λ1 )≈bb (λ2 )≈bb (λ3 )). ...
... 针对三波段法在高度浑浊水体中适用性较差,而四波段法对当前卫星传感器光谱分辨率要求较高的情况,Yang等[59 ] 提出了基于三波段法[55 ] 和四波段法[6 ] 改进后的三波段指数法,并在中国滇池和日本霞浦湖得到了较好的应用,精度相较于原始的三波段法有所提高.该方法基于四波段法的具体形式,但没有引入第四波段,而是重复使用第二波段以代替第四波段: ...
Optical Teledetection of Chlorophyll a in Turbid Inland Waters
2
1999
... Gons[56 ] 提出了与三波段反射率相关的另一种半分析算法,将叶绿素a的浓度与704 nm和672 nm处的反射比以及由776 nm处反射率计算出的后向散射系数bb 联系在一起: ...
... MODIS:0.75
MERIS:3.6;MODIS:6.1 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665 MERIS 0.96 / [50 ] 3BDA 0.63~65.51 塔甘罗格湾、亚速海岸 708、665、753 MERIS 0.95 5.02 [51 ] 7.80~154.30 太湖 691.37、721.90、854.18 Hyperion 0.87 13.93 [54 ] 2.27~200.81 内布拉斯加州弗里蒙特湖区 band7、9、10 MERIS 0.95 3.30 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665、753 MERIS 0.96 / [50 ] 3~185 荷兰和中国多湖 704、672、776 >0.95 / [56 ] 3~185 多个河湖及河口 704、664、776 MERIS 0.96 / [57 ] 4BDA 4~158 太湖 662、693、740、705 0.97 9.74 [6 ] 进一步消除了悬浮颗粒吸收和后向散射的影响 对传感器光谱分辨率要求较高 4.4 优缺点分析 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
A Chlorophyll-Retrieval Algorithm for Satellite Imagery(Medium Resolution Imaging Spectrometer) of Inland and Coastal Waters
2
2002
... 后Gons等[57 , 58 ] 进一步将该算法应用到MERIS传感器波段上,波段选取也进行了相应地调整和转换.经波段调整后,使得该方法在高叶绿素a浓度(>100 mg/m3 )水体中的稳定性和准确性优于其他算法. ...
... MODIS:0.75
MERIS:3.6;MODIS:6.1 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665 MERIS 0.96 / [50 ] 3BDA 0.63~65.51 塔甘罗格湾、亚速海岸 708、665、753 MERIS 0.95 5.02 [51 ] 7.80~154.30 太湖 691.37、721.90、854.18 Hyperion 0.87 13.93 [54 ] 2.27~200.81 内布拉斯加州弗里蒙特湖区 band7、9、10 MERIS 0.95 3.30 [20 ] 2~100 内布拉斯加州弗里蒙特湖区 708、665、753 MERIS 0.96 / [50 ] 3~185 荷兰和中国多湖 704、672、776 >0.95 / [56 ] 3~185 多个河湖及河口 704、664、776 MERIS 0.96 / [57 ] 4BDA 4~158 太湖 662、693、740、705 0.97 9.74 [6 ] 进一步消除了悬浮颗粒吸收和后向散射的影响 对传感器光谱分辨率要求较高 4.4 优缺点分析 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
Effect of a Waveband Shift on Chlorophyll Retrieval from Meris Imagery of Inland and Coastal Waters
1
2005
... 后Gons等[57 , 58 ] 进一步将该算法应用到MERIS传感器波段上,波段选取也进行了相应地调整和转换.经波段调整后,使得该方法在高叶绿素a浓度(>100 mg/m3 )水体中的稳定性和准确性优于其他算法. ...
An Enhanced Three-band Index for Estimating Chlorophyll-a in Turbid Case-Ii Waters: Case Studies of Lake Kasumigaura, Japan, and Lake Dianchi, China
2
2010
... 针对三波段法在高度浑浊水体中适用性较差,而四波段法对当前卫星传感器光谱分辨率要求较高的情况,Yang等[59 ] 提出了基于三波段法[55 ] 和四波段法[6 ] 改进后的三波段指数法,并在中国滇池和日本霞浦湖得到了较好的应用,精度相较于原始的三波段法有所提高.该方法基于四波段法的具体形式,但没有引入第四波段,而是重复使用第二波段以代替第四波段: ...
... 中国: 15.82
[59 ] 较3BDA更适用于高浑浊水体,对传感器分辨率要求比4BDA更低 受大气校正误差影响较大 NDCI 1~60 多个海湾和三角洲 708、665 MERIS 0.95 4.83 [60 ] 在缺乏实测数据、偏远地区也可以使用 受大气校正误差影响较大 SCI 春:0.03~3.10; ...
Normalized Difference Chlorophyll Index: A Novel Model for Remote Estimation of Chlorophyll-a Concentration in Turbid Productive Waters
2
2012
... 为提高叶绿素a反演算法在卫星数据以及不同水域的适用性,Mishra等[60 ] 提出了归一化叶绿素a指数法(NDCI),并基于NDCI开发了二次多项式反演算法.如式(22) 所示,NDCI与在植被遥感中得到广泛应用的NDVI(归一化植被指数)异曲同工,同样使用近红外和红外两个波段反射率的加和来对其差值进行归一化处理,以消除季节太阳方位角差异和大气条件等对反演精度的影响.该算法在多个内陆、河口和港湾水域均得到了较好的应用,反演效果更优. ...
... 中国: 15.82
[59 ] 较3BDA更适用于高浑浊水体,对传感器分辨率要求比4BDA更低 受大气校正误差影响较大 NDCI 1~60 多个海湾和三角洲 708、665 MERIS 0.95 4.83 [60 ] 在缺乏实测数据、偏远地区也可以使用 受大气校正误差影响较大 SCI 春:0.03~3.10; ...
Deriving Ocean Color Products Using Neural Networks
2
2013
... Awad[31 ] 基于Hyperion星载高光谱图像,使用监督式前馈反向传播人工神经网络算法(ANN-BP)估算黎巴嫩海岸区叶绿素a浓度.结果表明,使用ANN-BP算法,基于两年数据,实验区的决定系数R 2 可高达0.89和0.96,且均方根误差RMSE仅为0.03和0.45 mg/m3 .因近岸海域水体成分复杂,数据多呈现非线性关系,而人工神经网络在解决非线性问题上具有优势,为此类水域叶绿素a及其他水体光学组分浓度的反演提供了新思路.国内学者朱云芳等[34 ] 应用高分一号卫星的WFV4影像数据,采用BP神经网络算法反演太湖叶绿素a浓度,相较于传统的波段比值算法,该算法可有效提高叶绿素a反演精度.此外,Ioannou等[61 ] 使用多层感知器神经网络算法(MLPNN),基于MODIS可见光波段的反射率来反演水体固有光学特性指标IOPs,并使用反演出的IOPs以及对应的反射率值作为输入集,来训练另一个神经网络算法,最终输出叶绿素a浓度.这一算法的准确性高于未使用IOPs作为输入变量的算法以及传统的MODIS OC3算法. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
Remote Estimation of Chlorophyll a in Optically Complex Waters based on Optical Classification
1
2011
... 不同水体光学特征不同,而单一算法在遇到某些水体时往往反演精度不足,故发展出了基于水体分类的算法体系[22 , 62 ] .为进一步验证各类叶绿素a反演算法的普适性,深入分析各类水体的特征及其与不同算法的匹配程度,Neil等[63 ] 针对13种光学水体类型(OWTs),共列举了48种叶绿素a浓度反演算法,收集了源于185个内陆和沿岸水体的实测数据集,进而对比讨论了各类算法的反演精度和适用性.基于Spyrakos等[64 ] 提出的水体分类标准,Neil等[63 ] 开发了针对不同类型水体,同时考虑时空差异性的最佳算法参数组合,即动态变化算法(Dynamic Swit-ching Algorithm),而不是寻求单一参数配置的普适性算法.结果表明,该套算法将反演精度提高25%,相关系数达0.89,平均绝对误差仅为0.18 mg/m3 . ...
A Global Approach for Chlorophyll-a Retrieval across Optically Complex Inland Waters based on Optical Water Types
3
2019
... 不同水体光学特征不同,而单一算法在遇到某些水体时往往反演精度不足,故发展出了基于水体分类的算法体系[22 , 62 ] .为进一步验证各类叶绿素a反演算法的普适性,深入分析各类水体的特征及其与不同算法的匹配程度,Neil等[63 ] 针对13种光学水体类型(OWTs),共列举了48种叶绿素a浓度反演算法,收集了源于185个内陆和沿岸水体的实测数据集,进而对比讨论了各类算法的反演精度和适用性.基于Spyrakos等[64 ] 提出的水体分类标准,Neil等[63 ] 开发了针对不同类型水体,同时考虑时空差异性的最佳算法参数组合,即动态变化算法(Dynamic Swit-ching Algorithm),而不是寻求单一参数配置的普适性算法.结果表明,该套算法将反演精度提高25%,相关系数达0.89,平均绝对误差仅为0.18 mg/m3 . ...
... [63 ]开发了针对不同类型水体,同时考虑时空差异性的最佳算法参数组合,即动态变化算法(Dynamic Swit-ching Algorithm),而不是寻求单一参数配置的普适性算法.结果表明,该套算法将反演精度提高25%,相关系数达0.89,平均绝对误差仅为0.18 mg/m3 . ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
Optical Types of Inland and Coastal Waters
1
2018
... 不同水体光学特征不同,而单一算法在遇到某些水体时往往反演精度不足,故发展出了基于水体分类的算法体系[22 , 62 ] .为进一步验证各类叶绿素a反演算法的普适性,深入分析各类水体的特征及其与不同算法的匹配程度,Neil等[63 ] 针对13种光学水体类型(OWTs),共列举了48种叶绿素a浓度反演算法,收集了源于185个内陆和沿岸水体的实测数据集,进而对比讨论了各类算法的反演精度和适用性.基于Spyrakos等[64 ] 提出的水体分类标准,Neil等[63 ] 开发了针对不同类型水体,同时考虑时空差异性的最佳算法参数组合,即动态变化算法(Dynamic Swit-ching Algorithm),而不是寻求单一参数配置的普适性算法.结果表明,该套算法将反演精度提高25%,相关系数达0.89,平均绝对误差仅为0.18 mg/m3 . ...
用分析模型方法反演水体叶绿素的浓度
3
2006
... 分析类算法基于水中光学辐射传输机理,具有明确的物理意义,主要利用水体组分与固有光学量、表观光学量和固有光学量之间的关系,来模拟水中的光场分布,进而反演水质参数[65 ] .分析类算法最早源于Gordon等[66 ] 在1975年提出的生物光学算法.后Hoogenboom等[12 ] 使用矩阵反演的方法,基于生物光学模型,对叶绿素和悬浮物浓度进行了反演.Maritorena等[67 ] 开发了出了针对大洋类水体的GSM模型(Garver–Siegel–Maritorena model),反演精度与传统OC4v4算法相近,且可运用到SeaWiFS影像上.Lee等[68 ] 则开发出了针对二类水体的QAA(Quasi-Analytical Algorithm)算法,其中555 nm处的吸收系数由经验推导而得,在更复杂水域中的适用性有待验证. ...
... 但由于分析算法中的部分参数需要根据经验进行假定,研究区域的变化会导致参数发生变化,故国外学者开发的算法不能直接照搬到我国的水体中.为此,李云梅等[65 ] 基于Gordon模型对太湖叶绿素浓度进行反演,取得了不错的效果,但同时也指出模型参数受环境条件影响较大,各水体组分的固有光学特性也受到季节和区域因素的影响.因此,需要对特定水体各组分的光学特性进行更深入的研究.为解决上述问题,李俊生等[69 ] 建立了太湖单位固有光学量(SIOPs)数据库,进一步发展了三类分析方法,并使用了航空高光谱图像进行检验.韩留生等[70 ] 采用模拟退火算法,对生物光学模型中的悬浮物后向散射系数和双向反射因子进行了优化,为分析类算法应用于不同近岸水体中,提供了参数优化手段方面的参考. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
用分析模型方法反演水体叶绿素的浓度
3
2006
... 分析类算法基于水中光学辐射传输机理,具有明确的物理意义,主要利用水体组分与固有光学量、表观光学量和固有光学量之间的关系,来模拟水中的光场分布,进而反演水质参数[65 ] .分析类算法最早源于Gordon等[66 ] 在1975年提出的生物光学算法.后Hoogenboom等[12 ] 使用矩阵反演的方法,基于生物光学模型,对叶绿素和悬浮物浓度进行了反演.Maritorena等[67 ] 开发了出了针对大洋类水体的GSM模型(Garver–Siegel–Maritorena model),反演精度与传统OC4v4算法相近,且可运用到SeaWiFS影像上.Lee等[68 ] 则开发出了针对二类水体的QAA(Quasi-Analytical Algorithm)算法,其中555 nm处的吸收系数由经验推导而得,在更复杂水域中的适用性有待验证. ...
... 但由于分析算法中的部分参数需要根据经验进行假定,研究区域的变化会导致参数发生变化,故国外学者开发的算法不能直接照搬到我国的水体中.为此,李云梅等[65 ] 基于Gordon模型对太湖叶绿素浓度进行反演,取得了不错的效果,但同时也指出模型参数受环境条件影响较大,各水体组分的固有光学特性也受到季节和区域因素的影响.因此,需要对特定水体各组分的光学特性进行更深入的研究.为解决上述问题,李俊生等[69 ] 建立了太湖单位固有光学量(SIOPs)数据库,进一步发展了三类分析方法,并使用了航空高光谱图像进行检验.韩留生等[70 ] 采用模拟退火算法,对生物光学模型中的悬浮物后向散射系数和双向反射因子进行了优化,为分析类算法应用于不同近岸水体中,提供了参数优化手段方面的参考. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
Computed Relationships between the Inherent and Apparent Optical Properties of a Flat Homogeneous Ocean
1
1975
... 分析类算法基于水中光学辐射传输机理,具有明确的物理意义,主要利用水体组分与固有光学量、表观光学量和固有光学量之间的关系,来模拟水中的光场分布,进而反演水质参数[65 ] .分析类算法最早源于Gordon等[66 ] 在1975年提出的生物光学算法.后Hoogenboom等[12 ] 使用矩阵反演的方法,基于生物光学模型,对叶绿素和悬浮物浓度进行了反演.Maritorena等[67 ] 开发了出了针对大洋类水体的GSM模型(Garver–Siegel–Maritorena model),反演精度与传统OC4v4算法相近,且可运用到SeaWiFS影像上.Lee等[68 ] 则开发出了针对二类水体的QAA(Quasi-Analytical Algorithm)算法,其中555 nm处的吸收系数由经验推导而得,在更复杂水域中的适用性有待验证. ...
Optimization of a Semianalytical Ocean Color Model for Global-scale Applications
2
2002
... 分析类算法基于水中光学辐射传输机理,具有明确的物理意义,主要利用水体组分与固有光学量、表观光学量和固有光学量之间的关系,来模拟水中的光场分布,进而反演水质参数[65 ] .分析类算法最早源于Gordon等[66 ] 在1975年提出的生物光学算法.后Hoogenboom等[12 ] 使用矩阵反演的方法,基于生物光学模型,对叶绿素和悬浮物浓度进行了反演.Maritorena等[67 ] 开发了出了针对大洋类水体的GSM模型(Garver–Siegel–Maritorena model),反演精度与传统OC4v4算法相近,且可运用到SeaWiFS影像上.Lee等[68 ] 则开发出了针对二类水体的QAA(Quasi-Analytical Algorithm)算法,其中555 nm处的吸收系数由经验推导而得,在更复杂水域中的适用性有待验证. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
Deriving Inherent Optical Properties from Water Color: A Multiband Quasi-Analytical Algorithm for Optically Deep Waters
2
2002
... 分析类算法基于水中光学辐射传输机理,具有明确的物理意义,主要利用水体组分与固有光学量、表观光学量和固有光学量之间的关系,来模拟水中的光场分布,进而反演水质参数[65 ] .分析类算法最早源于Gordon等[66 ] 在1975年提出的生物光学算法.后Hoogenboom等[12 ] 使用矩阵反演的方法,基于生物光学模型,对叶绿素和悬浮物浓度进行了反演.Maritorena等[67 ] 开发了出了针对大洋类水体的GSM模型(Garver–Siegel–Maritorena model),反演精度与传统OC4v4算法相近,且可运用到SeaWiFS影像上.Lee等[68 ] 则开发出了针对二类水体的QAA(Quasi-Analytical Algorithm)算法,其中555 nm处的吸收系数由经验推导而得,在更复杂水域中的适用性有待验证. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
太湖水体3种典型水质参数的高光谱遥感反演
1
2009
... 但由于分析算法中的部分参数需要根据经验进行假定,研究区域的变化会导致参数发生变化,故国外学者开发的算法不能直接照搬到我国的水体中.为此,李云梅等[65 ] 基于Gordon模型对太湖叶绿素浓度进行反演,取得了不错的效果,但同时也指出模型参数受环境条件影响较大,各水体组分的固有光学特性也受到季节和区域因素的影响.因此,需要对特定水体各组分的光学特性进行更深入的研究.为解决上述问题,李俊生等[69 ] 建立了太湖单位固有光学量(SIOPs)数据库,进一步发展了三类分析方法,并使用了航空高光谱图像进行检验.韩留生等[70 ] 采用模拟退火算法,对生物光学模型中的悬浮物后向散射系数和双向反射因子进行了优化,为分析类算法应用于不同近岸水体中,提供了参数优化手段方面的参考. ...
太湖水体3种典型水质参数的高光谱遥感反演
1
2009
... 但由于分析算法中的部分参数需要根据经验进行假定,研究区域的变化会导致参数发生变化,故国外学者开发的算法不能直接照搬到我国的水体中.为此,李云梅等[65 ] 基于Gordon模型对太湖叶绿素浓度进行反演,取得了不错的效果,但同时也指出模型参数受环境条件影响较大,各水体组分的固有光学特性也受到季节和区域因素的影响.因此,需要对特定水体各组分的光学特性进行更深入的研究.为解决上述问题,李俊生等[69 ] 建立了太湖单位固有光学量(SIOPs)数据库,进一步发展了三类分析方法,并使用了航空高光谱图像进行检验.韩留生等[70 ] 采用模拟退火算法,对生物光学模型中的悬浮物后向散射系数和双向反射因子进行了优化,为分析类算法应用于不同近岸水体中,提供了参数优化手段方面的参考. ...
近岸二类水体生物光学模型参数优化
2
2014
... 但由于分析算法中的部分参数需要根据经验进行假定,研究区域的变化会导致参数发生变化,故国外学者开发的算法不能直接照搬到我国的水体中.为此,李云梅等[65 ] 基于Gordon模型对太湖叶绿素浓度进行反演,取得了不错的效果,但同时也指出模型参数受环境条件影响较大,各水体组分的固有光学特性也受到季节和区域因素的影响.因此,需要对特定水体各组分的光学特性进行更深入的研究.为解决上述问题,李俊生等[69 ] 建立了太湖单位固有光学量(SIOPs)数据库,进一步发展了三类分析方法,并使用了航空高光谱图像进行检验.韩留生等[70 ] 采用模拟退火算法,对生物光学模型中的悬浮物后向散射系数和双向反射因子进行了优化,为分析类算法应用于不同近岸水体中,提供了参数优化手段方面的参考. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
近岸二类水体生物光学模型参数优化
2
2014
... 但由于分析算法中的部分参数需要根据经验进行假定,研究区域的变化会导致参数发生变化,故国外学者开发的算法不能直接照搬到我国的水体中.为此,李云梅等[65 ] 基于Gordon模型对太湖叶绿素浓度进行反演,取得了不错的效果,但同时也指出模型参数受环境条件影响较大,各水体组分的固有光学特性也受到季节和区域因素的影响.因此,需要对特定水体各组分的光学特性进行更深入的研究.为解决上述问题,李俊生等[69 ] 建立了太湖单位固有光学量(SIOPs)数据库,进一步发展了三类分析方法,并使用了航空高光谱图像进行检验.韩留生等[70 ] 采用模拟退火算法,对生物光学模型中的悬浮物后向散射系数和双向反射因子进行了优化,为分析类算法应用于不同近岸水体中,提供了参数优化手段方面的参考. ...
... 算法
ANN-BP 2006:0.06~0.32;2008:0.03~8.84 地中海东海岸 / Hyperion 2006:0.89 2008:0.96 2006:0.03 2008:0.45 [31 ] 在解决非线性问题上有优势,适用于光学组分复杂的水体 对训练集的数据质量要求较高;算法复杂程度高 MLPNN 0.02~70 / 412、443、488、531、547、667 MODIS 0.90 0.22(log10) [61 ] ANN-BP 0~120 太湖 b4/b3;b4/b2;b4/b1;b4/(b1+b2+b3) GF-1 WFV4 0.97 7.61 [34 ] LS-SVM 15~75 清河水库 b5/b4 Landsat OLI 0.97 2.67 [29 ] 在解决小样本、非线性问题上具有优势 研究样本量和采样周期均有限,算法普适性待进一步验证 LS-SVM 1~64 大伙房水库 b2~b1 环境卫星 CCD 0.82 / [33 ] 基于水体分类的算法体系 动态变化算法体系 0~1 000 185个内陆和沿海水域 / / 0.79 / [63 ] 样本数据覆盖13种水体,算法普适性高 实际应用相对较复杂,需先判断水体类型,后选择推荐的相应算法 分析类算法 GSM 0.04~5 大洋类 / SeaWiFs 0.82 0.19 [67 ] 具有明确的物理意义,普适性较高 理论推导较复杂,参数准确获取难度高 QAA 0.03~30 / / / / / [68 ] / 0~100 太湖 / / 0.99 / [65 ] / 0.20~11.60 珠江口、韩江河口、徐闻珊瑚礁保护区 / / / / [70 ] 5 结 语 经过40 a的发展,利用遥感技术反演水体叶绿素a浓度取得了丰硕的成果.但依旧面临以下挑战,有待加强研究: ...
A Coordinator’s Guide to Volunteer Lake Monitoring Methods
1
1996
... 根据Carlson和Simpson[71 ] 的分类标准,叶绿素浓度小于2.6 mg/m3 的为贫营养水体;叶绿素浓度大于2.6且小于20 mg/m3 的为中营养水体;叶绿素浓度大于20且小于56 mg/m3 的为富营养水体;叶绿素浓度大于56 mg/m3 的为超富营养水体.图2 为算法应用到的叶绿素浓度区间,由图2 可知,除去精度不高的FLH BLUE/VIOLET算法(R 2 =0.38/0.55),FLH算法适用于中低水平叶绿素浓度的水体;NFH、FEA和MPH算法适用的浓度区间范围较广;MCI在贫营养水体中不太适用;针对大洋类水体的OCx和Hu指数算法适用于中低浓度叶绿素水体,但在低浓度水体中表现更好(OCx算法数据集的叶绿素浓度区间集中在0.08~3 mg/m3 ;Hu指数算法在叶绿素a浓度小于0.25mg/m3 的海洋中表现更佳);波段算法BDA(除OCx外)主要适用于中高浓度叶绿素水体,相较于部分荧光峰、反射峰类算法,适用的浓度范围要更窄;Yang指数算法适用于富营养化或超富营养化水体;NDCI、SCI和LS-SVM算法不太适用于超富营养化水体;神经网络算法既可用于叶绿素浓度极低(<0.01 mg/m3 )的水体,也可用于超富营养化水体;动态变化算法适用的浓度区间最广;分析类算法同样具有较好的适用性. ...
海洋水色遥感大气校正算法研究进展
1
2008
... Ⅰ类水体组成成分相较于Ⅱ类水体要更加简单,其光学性质主要受到浮游植物及其伴生物的影响,故针对Ⅰ类水体的OCx和Hu指数算法均在全球大范围海域内得到应用.而Ⅱ类水体的光学性质还受到悬浮物和黄色物质的影响,水体组分复杂多变,给叶绿素a浓度反演带来了很大的不确定性[72 ] ,故除算法体系外,针对Ⅱ类水体的算法应用范围比较受限,大部分仅在特定的实验水域内得到验证.其中,MPH、2/3BD(除OCx外)以及NN算法在较多种不同水域中得到应用,适用水体类型相对较广.分析类算法在各类水体中的适用性都较高.不同算法适用的水体类型如图3 所示,此处Open Sea指的是没有被任何陆地包围的海洋主体部分,Inland Water指的是湖泊、水库及河流内陆部分的水域,Costal Water指的是海岸、河口和三角洲等海陆交汇区.需要注意的是,虽然荧光峰算法已应用于图中三类水域中,但针对内陆水体FLH BLUE/VIOLET算法精度不高,荧光峰算法在此类水域的反演精度有待进一步验证和提高. ...
海洋水色遥感大气校正算法研究进展
1
2008
... Ⅰ类水体组成成分相较于Ⅱ类水体要更加简单,其光学性质主要受到浮游植物及其伴生物的影响,故针对Ⅰ类水体的OCx和Hu指数算法均在全球大范围海域内得到应用.而Ⅱ类水体的光学性质还受到悬浮物和黄色物质的影响,水体组分复杂多变,给叶绿素a浓度反演带来了很大的不确定性[72 ] ,故除算法体系外,针对Ⅱ类水体的算法应用范围比较受限,大部分仅在特定的实验水域内得到验证.其中,MPH、2/3BD(除OCx外)以及NN算法在较多种不同水域中得到应用,适用水体类型相对较广.分析类算法在各类水体中的适用性都较高.不同算法适用的水体类型如图3 所示,此处Open Sea指的是没有被任何陆地包围的海洋主体部分,Inland Water指的是湖泊、水库及河流内陆部分的水域,Costal Water指的是海岸、河口和三角洲等海陆交汇区.需要注意的是,虽然荧光峰算法已应用于图中三类水域中,但针对内陆水体FLH BLUE/VIOLET算法精度不高,荧光峰算法在此类水域的反演精度有待进一步验证和提高. ...
太湖水体叶绿素浓度反演模型适宜性分析
2
2015
... 因不同传感器波段配置不同,有的能够很好地反映算法中所使用的光谱波段,有的传感器则无法涵盖某些叶绿素a特征波段,故不同的叶绿素a反演算法在不同的传感器中适应性有较大差异[11 ] .如果波段位置接近于叶绿素a的特征波长时,较窄的波段宽度有利于提高算法精度;而当波段位置距叶绿素a特征波长较远时,适当地增加波段宽度能够更好地获取叶绿素a特征信息[73 ] .例如,Landsat 8的波段配置使其无法检测到叶绿素a近红外波段的特征波峰,即使是使用改进后的FLH-Violet算法,算法反演效果也不太理想[11 , 28 ] ;MODIS的空间分辨率较低,故不适用于中小型湖泊叶绿素a浓度反演;MERIS经常应用于监测中大型水体水华爆发情况,但同样因为空间分辨率较低的原因,不适用于狭长型小水体;Hyperion波段较多较密,在光谱分辨率和空间分辨率上都具有优势,但重返周期长,时间分辨率较低.各类算法所用波段以及在不同卫星传感器的应用情况如表2 所示. ...
... (1)水体叶绿素a遥感算法历经几十年的发展,在Ⅰ类水体中已取得较好的成果,基本能够实现大范围反演,反演算法外推性适应性较强.而对于Ⅱ类水体而言,由于悬浮物、黄色物质等光学活性组分的影响,光学特性复杂,反演难度较大.各反演算法仍受到季节、地理位置以及水体类型等的限制.很多学者对已有方法进行了对比,但多数仅针对某个水体进行经验性验证,缺乏深入分析,得出的算法孰优孰劣的结论也不尽相同[73 , 75 -78 ] ,全球尺度的普适性算法缺乏.为了能够在更大的时间、空间尺度上建立起业务化、普适性叶绿素a反演算法或算法体系,应当建立并完善类似于NOMAD等[79 ] 的实测数据集.针对基于水体分类的反演算法体系,还应充分挖掘不同水体的光学特性,深入探究水体光学特性对水面遥感反射率的影响,细化水体分类标准,提高分类准确性. ...
太湖水体叶绿素浓度反演模型适宜性分析
2
2015
... 因不同传感器波段配置不同,有的能够很好地反映算法中所使用的光谱波段,有的传感器则无法涵盖某些叶绿素a特征波段,故不同的叶绿素a反演算法在不同的传感器中适应性有较大差异[11 ] .如果波段位置接近于叶绿素a的特征波长时,较窄的波段宽度有利于提高算法精度;而当波段位置距叶绿素a特征波长较远时,适当地增加波段宽度能够更好地获取叶绿素a特征信息[73 ] .例如,Landsat 8的波段配置使其无法检测到叶绿素a近红外波段的特征波峰,即使是使用改进后的FLH-Violet算法,算法反演效果也不太理想[11 , 28 ] ;MODIS的空间分辨率较低,故不适用于中小型湖泊叶绿素a浓度反演;MERIS经常应用于监测中大型水体水华爆发情况,但同样因为空间分辨率较低的原因,不适用于狭长型小水体;Hyperion波段较多较密,在光谱分辨率和空间分辨率上都具有优势,但重返周期长,时间分辨率较低.各类算法所用波段以及在不同卫星传感器的应用情况如表2 所示. ...
... (1)水体叶绿素a遥感算法历经几十年的发展,在Ⅰ类水体中已取得较好的成果,基本能够实现大范围反演,反演算法外推性适应性较强.而对于Ⅱ类水体而言,由于悬浮物、黄色物质等光学活性组分的影响,光学特性复杂,反演难度较大.各反演算法仍受到季节、地理位置以及水体类型等的限制.很多学者对已有方法进行了对比,但多数仅针对某个水体进行经验性验证,缺乏深入分析,得出的算法孰优孰劣的结论也不尽相同[73 , 75 -78 ] ,全球尺度的普适性算法缺乏.为了能够在更大的时间、空间尺度上建立起业务化、普适性叶绿素a反演算法或算法体系,应当建立并完善类似于NOMAD等[79 ] 的实测数据集.针对基于水体分类的反演算法体系,还应充分挖掘不同水体的光学特性,深入探究水体光学特性对水面遥感反射率的影响,细化水体分类标准,提高分类准确性. ...
Remote Sensing of Cyanobacteria-dominant Algal Blooms and Water Quality Parameters in Zeekoevlei, a Small Hypertrophic Lake, Using Meris
1
2010
... 表2 对文中列举的水体叶绿素a反演算法的应用情况和优缺点进行了详细总结.其中,荧光峰类算法能够排除背景值的影响,但荧光峰位置常随叶绿素a浓度增高而向波长更长的方向偏移,而卫星传感器的通道是固定的,故限制了荧光法的进一步推广[44 ] ;反射峰算法的设计类似于荧光峰算法,同样受到峰值位置变化的影响,更适用于富营养化、表面水华爆发的水体,二种算法均对大气校正误差不敏感[74 ] .蓝绿波段比值法在叶绿素a浓度较低的大洋等一类水体中表现较好,近红外—红光波段比值法则更适用于Ⅱ类水体,但是不同学者所提出的波段法的算法结构和参数设置均有一定差异,尚未建立具有普适性的反演算法.各类指数法各有千秋,适用于不同类型的水体,且对大气校正误差等的敏感程度不同,应针对性选用;基于人工神经网络和支持向量机的智能算法能够有效提高反演精度,在解决非线性问题上具有优势,但算法复杂程度较高,且其内在机理有待进一步探究.基于水体分类的算法体系普适性最高,但分类标准有待进一步讨论,且算法复杂程度较高.分析类算法具有严格的物理基础,通用性相对较强,但模型复杂程度较高,且对固有光学参数的获取有较高的要求,而二类水体光学特性复杂,为该类参数的精确测量带来了挑战;除此之外,部分分析类算法引入了经验关系,可能在一定程度上降低反演精度,并且使得开发出来的算法在不同区域和季节上不具有适用性. ...
Analysis of Meris Reflectance Algorithms for Estimating Chlorophyll-a Concentration in a Brazilian Reservoir
1
2014
... (1)水体叶绿素a遥感算法历经几十年的发展,在Ⅰ类水体中已取得较好的成果,基本能够实现大范围反演,反演算法外推性适应性较强.而对于Ⅱ类水体而言,由于悬浮物、黄色物质等光学活性组分的影响,光学特性复杂,反演难度较大.各反演算法仍受到季节、地理位置以及水体类型等的限制.很多学者对已有方法进行了对比,但多数仅针对某个水体进行经验性验证,缺乏深入分析,得出的算法孰优孰劣的结论也不尽相同[73 , 75 -78 ] ,全球尺度的普适性算法缺乏.为了能够在更大的时间、空间尺度上建立起业务化、普适性叶绿素a反演算法或算法体系,应当建立并完善类似于NOMAD等[79 ] 的实测数据集.针对基于水体分类的反演算法体系,还应充分挖掘不同水体的光学特性,深入探究水体光学特性对水面遥感反射率的影响,细化水体分类标准,提高分类准确性. ...
Evaluation of Chlorophyll-a Remote Sensing Algorithms for an Optically Complex Estuary
0
2013
春季太湖叶绿素 a 浓度的光谱估算与分析评价
0
2012
春季太湖叶绿素 a 浓度的光谱估算与分析评价
0
2012
基于实测光谱的烟台四十里湾水体叶绿素 a 遥感反演
1
2015
... (1)水体叶绿素a遥感算法历经几十年的发展,在Ⅰ类水体中已取得较好的成果,基本能够实现大范围反演,反演算法外推性适应性较强.而对于Ⅱ类水体而言,由于悬浮物、黄色物质等光学活性组分的影响,光学特性复杂,反演难度较大.各反演算法仍受到季节、地理位置以及水体类型等的限制.很多学者对已有方法进行了对比,但多数仅针对某个水体进行经验性验证,缺乏深入分析,得出的算法孰优孰劣的结论也不尽相同[73 , 75 -78 ] ,全球尺度的普适性算法缺乏.为了能够在更大的时间、空间尺度上建立起业务化、普适性叶绿素a反演算法或算法体系,应当建立并完善类似于NOMAD等[79 ] 的实测数据集.针对基于水体分类的反演算法体系,还应充分挖掘不同水体的光学特性,深入探究水体光学特性对水面遥感反射率的影响,细化水体分类标准,提高分类准确性. ...
基于实测光谱的烟台四十里湾水体叶绿素 a 遥感反演
1
2015
... (1)水体叶绿素a遥感算法历经几十年的发展,在Ⅰ类水体中已取得较好的成果,基本能够实现大范围反演,反演算法外推性适应性较强.而对于Ⅱ类水体而言,由于悬浮物、黄色物质等光学活性组分的影响,光学特性复杂,反演难度较大.各反演算法仍受到季节、地理位置以及水体类型等的限制.很多学者对已有方法进行了对比,但多数仅针对某个水体进行经验性验证,缺乏深入分析,得出的算法孰优孰劣的结论也不尽相同[73 , 75 -78 ] ,全球尺度的普适性算法缺乏.为了能够在更大的时间、空间尺度上建立起业务化、普适性叶绿素a反演算法或算法体系,应当建立并完善类似于NOMAD等[79 ] 的实测数据集.针对基于水体分类的反演算法体系,还应充分挖掘不同水体的光学特性,深入探究水体光学特性对水面遥感反射率的影响,细化水体分类标准,提高分类准确性. ...
An Improved In-situ Bio-optical Data Set for Ocean Color Algorithm Development and Satellite Data Product Validation
1
2005
... (1)水体叶绿素a遥感算法历经几十年的发展,在Ⅰ类水体中已取得较好的成果,基本能够实现大范围反演,反演算法外推性适应性较强.而对于Ⅱ类水体而言,由于悬浮物、黄色物质等光学活性组分的影响,光学特性复杂,反演难度较大.各反演算法仍受到季节、地理位置以及水体类型等的限制.很多学者对已有方法进行了对比,但多数仅针对某个水体进行经验性验证,缺乏深入分析,得出的算法孰优孰劣的结论也不尽相同[73 , 75 -78 ] ,全球尺度的普适性算法缺乏.为了能够在更大的时间、空间尺度上建立起业务化、普适性叶绿素a反演算法或算法体系,应当建立并完善类似于NOMAD等[79 ] 的实测数据集.针对基于水体分类的反演算法体系,还应充分挖掘不同水体的光学特性,深入探究水体光学特性对水面遥感反射率的影响,细化水体分类标准,提高分类准确性. ...
Deep Learning and Process Understanding for Data-driven Earth System Science
1
2019
... (3)随着人工智能等技术的进步,机器学习等手段在遥感数据处理中得到越来越多的应用.神经网络、支持向量机等算法在解决非线性问题方面具有优势,且算法精度相对传统算法有所提高.然而,深度神经网络等机器学习算法缺乏可解释性,变量之间确切的因果关系尚未明晰[80 ] .未来在全球尺度下验证已有机器学习算法的基础上,进一步开发新型算法也是十分有必要的.除此之外,不能只满足于算法准确性的提高,应加强对机器学习算法内在机理的探析,发展与物理建模相结合的物理原理约束的机器学习方法. ...





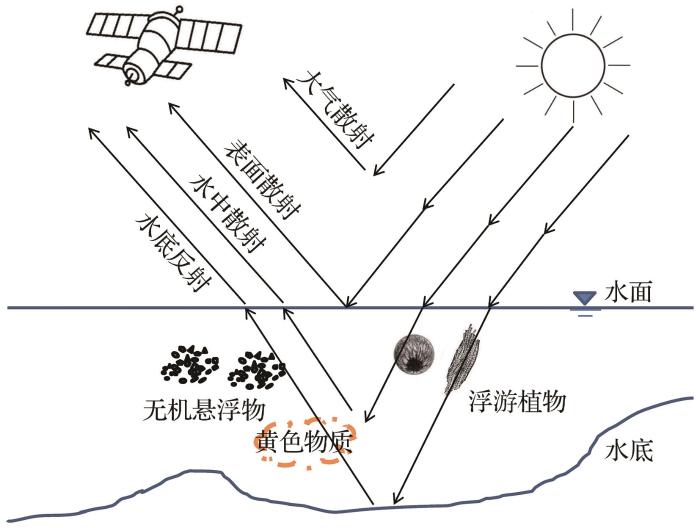
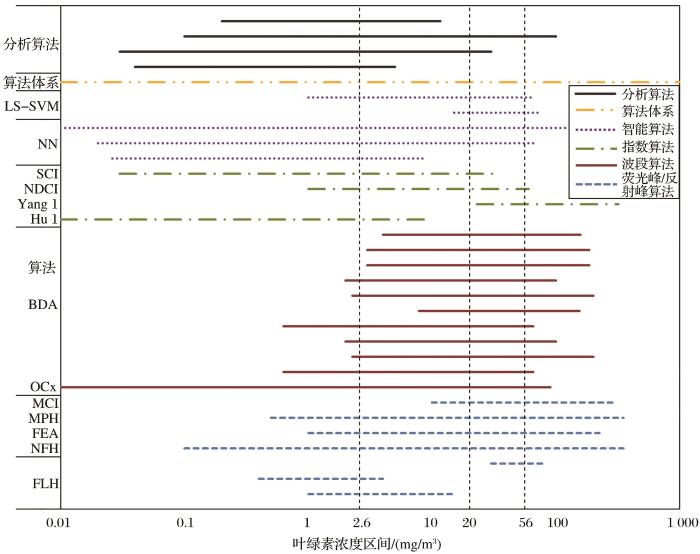
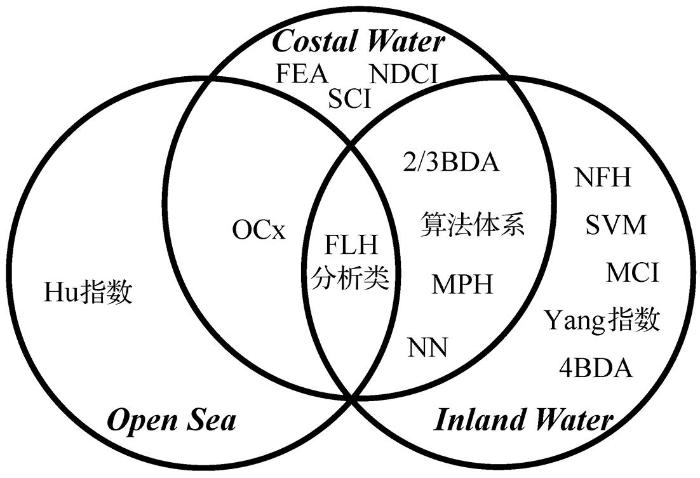

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}