一种TDM-MIMO FMCW车载毫米波雷达目标检测方法
陈思翔 , 1 , 2 , 3 , 张云华 , 1 , 2 , 3 , 杨杰芳 1 , 2
1.中国科学院国家空间科学中心,北京 100190
2.中国科学院微波遥感技术重点实验室,北京 100190
3.中国科学院大学,北京 100049
Target Detection Scheme for TDM-MIMO FMCW Automotive Millimeter Wave Radar
Chen Sixiang , 1 , 2 , 3 , Zhang Yunhua , 1 , 2 , 3 , Yang Jiefang 1 , 2
1.National Space Sciences Center,Chinese Academy of Sciences,Beijing 100190,China
2.Key Laboratory of Microwave Remote Sensing Technology,Chinese Academy of Sciences,Beijing 100190,China
3.University of Chinese Academy of Sciences,Beijing 200049,China
通讯作者: 张云华(1967-),男,研究员,主要从事微波遥感理论与技术、雷达系统和信号处理方面的研究。E⁃mail:zhangyunhua@mirslab.cn
收稿日期: 2020-03-17
修回日期: 2021-04-16
网络出版日期: 2021-09-26
基金资助:
中国家自然科学基金面上项目 . 61971402 . 41871274
Received: 2020-03-17
Revised: 2021-04-16
Online: 2021-09-26
作者简介 About authors
陈思翔(1995-),男,四川成都人,硕士研究生,主要从事毫米波雷达信号处理及目标聚类、关联和跟踪研究E⁃mail:18608027721@163.com
, E-mail:18608027721@163.com
摘要
毫米波雷达作为汽车自动驾驶重要传感器之一,其主要功能是对车辆周围目标进行距离、速度和角度的测量。根据车载毫米波雷达一般使用场景,设计了一种以快速chirp信号作为发射波形的2发4收TDM-MIMO FMCW毫米波雷达目标检测方案以及相应的3D-FFT目标检测算法,可同时得到目标距离、速度和角度。通过优化天线阵元排布,该方案可有效解决常规TDM-MIMO由于通道时分复用导致对目标测速时的不模糊速度区间减小的问题。相比于常规发射三角波的车载雷达,该方案可以有效避免多目标速度匹配问题;相比于单脉冲测角,该方案可以极大地改善角度分辨率。最后,通过Matlab仿真验证了该方案和算法的有效性。
关键词:
车载毫米波雷达 TDM⁃MIMO FMCW 目标检测 速度模糊
Abstract
Millimeter wave radar is one of the important sensors for auto driving. Its main function is to measure the distance, speed and angle of targets around the vehicle. According to the general application scenario of vehicle-mounted (automotive) millimeter-wave radar, a two-transmitter, four-receiver TDM-MIMO FMCW millimeter-wave radar scheme with a fast chirp signal as the transmission waveform and a corresponding 3D-FFT target detection algorithm are designed, which can simultaneously obtain the target distance, speed and angle. By optimizing the arrangement of antenna elements, our solution can effectively solve the problem of unambiguous speed interval reduction of conventional TDM-MIMO radar due to channel time division multiplexing when measuring the target speed. Compared with conventional triangle waveform radar, the scheme can effectively avoid the problem of multiple target speed matching. Compared with single pulse angle measurement scheme, the scheme can greatly improve the angular resolution. Finally, we validate the proposed scheme by Matlab simulation.
Keywords:
Automotive Millimeter Wave Radar TDM-MIMO FMCW Target detection Velocity ambiguity
本文引用格式
陈思翔, 张云华, 杨杰芳. 一种TDM-MIMO FMCW车载毫米波雷达目标检测方法 . 遥感技术与应用 [J], 2021, 36(4): 803-809 doi:10.11873/j.issn.1004-0323.2021.4.0803
Chen Sixiang, Zhang Yunhua, Yang Jiefang. Target Detection Scheme for TDM-MIMO FMCW Automotive Millimeter Wave Radar . Remote Sensing Technology and Application
1 引 言
随着科技的发展与日益增长的交通压力,自动驾驶技术近年来受到了广泛的关注[1 ] 。传感器作为自动驾驶技术核心部件,通常采用视觉摄像头、毫米波雷达或激光雷达[2 ] 。其中,毫米波雷达因在恶劣天气下稳定的探测效果,具有不可替代的作用[3 ] 。
实验主要针对分时复用多输入多输出调频连续波(Time Division Multiplexing-Multiple Input Multiple Output Frequency Modulated Continuous Wave,TDM-MIMO FMCW)车载毫米波雷达信号处理问题开展研究。TDM-MIMO FMCW雷达通常以快速chirp信号作为雷达发射波形。在本实验中,首先对回波进行二维快速傅立叶变换(Fast Fourier Transform,FFT)得到距离—多普勒(Range-Doppler,RD)谱,进而得到目标距离、速度信息[4 ] ;然后,对TDM-MIMO形成的虚拟阵列得到的多通道信号进行FFT,得到目标角度信息。以上通过3个维度的FFT操作获得目标的距离、速度和角度信息,因此称为三维FFT(3D-FFT)检测算法。
但是,常规TDM-MIMO会降低速度维的采样率,导致对目标测速的不模糊速度区间减小,速度测量时会产生速度模糊[5 -6 ] 。为此,提出了一种优化MIMO天线阵元排布间距,使得其中两个虚拟阵元相位中心重合,通过将这两个通道的回波信号数据交替排布,增加测速时的不模糊速度区间。
实验针对TDM-MIMO FMCW雷达提出的这种3D-FFT检测算法[7 ] 可以有效地避免三角波雷达多目标速度匹配问题。并且相较于单脉冲测角,可以极大地改善角度分辨率[8 -9 ] 。
2 TDM-MIMO FMCW雷达工作原理
从测距、测速和测角3个方面具体介绍TDM-MIMO FMCW雷达进行目标检测的原理。车载TDM-MIMO FMCW雷达通常使用快速chirp作为发射信号。快速chirp信号通常指小时宽、大带宽的调频连续波信号(Frequency Modulated Continuous Wave,FMCW)[10 -11 ] 。
2.1 测距原理
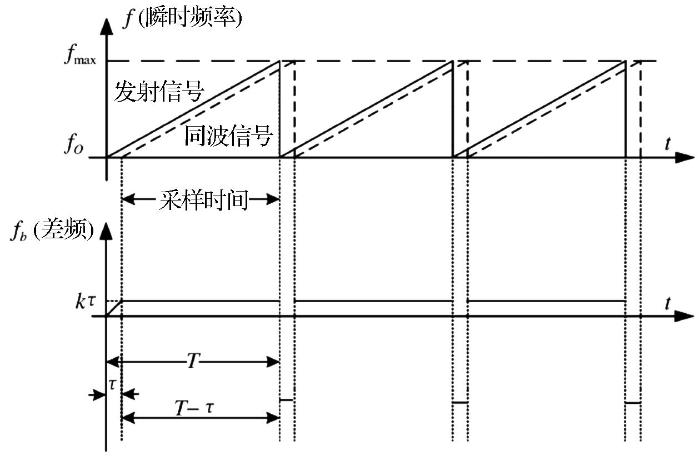
TDM-MIMO FMCW雷达测距的基本原理是根据去斜[12 ] 后的中频信号频率推算出回波的时延,进而计算出目标的距离信息,如图1 所示。
图1
图1
差拍信号示意图
Fig.1
Schematic diagram of the beat signal
假设发射快速chirp信号时宽为T p B f c
S T X = A e x p j ( 2 π f c t + π k t 2 ) (1)
假设目标与雷达距离为R τ = 2 R c
S R X = A e x p j ( 2 π f c ( t - τ ) + π k ( t - τ ) 2 ) (2)
通过与参考信号去斜和低通滤波后,得到差拍信号如下所示[13 ] :
S I F = A e x p j ( 2 π ⋅ k τ ⋅ t + 2 π f c τ - π k τ 2 ) (3)
由上式可以看到,差拍信号的频率受回波时延τ f I F = k τ f I F
R = c 2 B ⋅ f I F ⋅ T p (4)
式(2)回波信号模型忽略了目标运动的多普勒频移。当雷达观测运动目标时,通常使用下式计算目标的多普勒频移:
f d = 2 v λ (5)
对于车载毫米波雷达,观测目标与雷达的距离一般在200 m以内,相对运动速度v 式(5)计算可得f d ≤ 3.5 × 10 4 H z p =15 μs,观测目标距离雷达2~150 m之间,典型值为100 m,根据式(3)可得f I F ≈ 10 7 H z f d ≪ f I F
假设AD采样率为f S t 0 N r 式(4)可知,最大的不模糊检测距离受最大采样频率限制为:
R m a x = c 2 B ⋅ f S ⋅ T p (6)
R r e s = c 2 B ⋅ f S ⋅ T p N r (7)
R r e s = c 2 B ⋅ T p t 0 (8)
2.2 测速原理
TDM-MIMO FMCW雷达根据相邻回波之间的相位变化来推算目标的速度。由于目标的运动,相邻两次回波对应的目标位置发生微小移动,导致相邻两次回波信号相位发生变化,通过计算出相位变化率,便可推测出目标的径向速度。
假设观测目标速度为v T C
Δ φ = 4 π λ ⋅ Δ d - π k 2 Δ d c 2 ≈ 4 π λ ⋅ Δ d (9)
其中:Δ d = v ⋅ T C Δ d ≪ c π k 2 Δ d c 2
v = λ ⋅ Δ φ 4 π T C (10)
在数字信号处理中,Δ φ - π , π
v ∈ - λ 4 T C , λ 4 T C (11)
v m a x = ± λ 4 T C (12)
假设一次相干处理的回波个数为N d
v r e s = λ 2 T C ⋅ N d (13)
2.3 测角原理
TDM-MIMO FMCW雷达测角是根据目标在各个虚拟阵元的回波的相位受到其与天线间角度和各阵元间距离的调制,通过计算出目标在各个虚拟阵元中的相位变化率,反推出目标的角度信息。
假设虚拟阵列相邻两阵元的间距为d θ
φ = 2 π λ ⋅ d ⋅ s i n θ (14)
θ = a r c s i n φ π (15)
假定虚拟阵元数为N
Δ φ = 2 π N Δ φ = π ⋅ ( s i n θ + Δ θ - s i n θ ) (16)
s i n θ + Δ θ - s i n θ = c o s θ ⋅ Δ θ (17)
θ r e s = 2 N ⋅ c o s θ ⋅ 180 π (18)
3 典型2发4收TDM-MIMO阵元排布方案及速度模糊问题
典型均匀线阵2发4收TDM-MIMO雷达,如某公司研制的某款77 GHz车载防撞雷达,其系统参数如表1 所示。
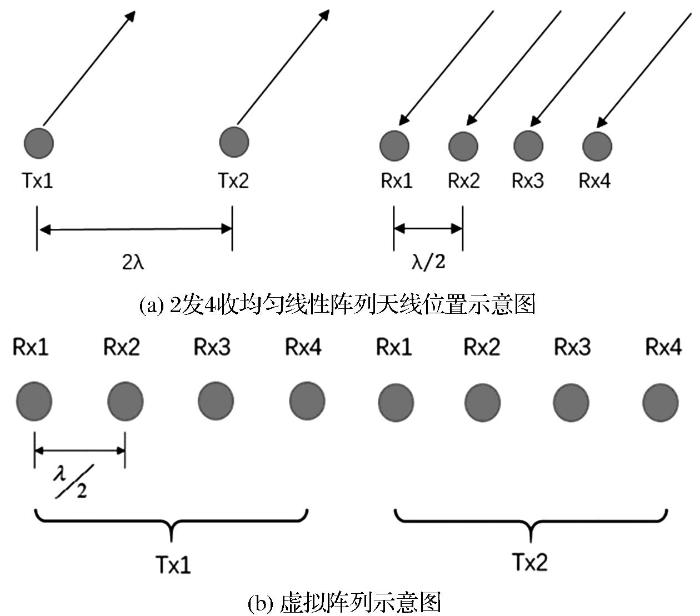
由2个间距为2 λ λ / 2 λ / 2 [14 ,15 ] ,如图3 所示。由式(18)可得,在雷达天线波束的法线方向(θ = 0 ∘
图3
图3
2发4收均匀线性阵列天线收发原理图
Fig.3
Schematic of uniform linear array antenna
由于Tx1和Tx2交替发射,对于同一虚拟阵元而言,相邻两次回波间隔为T C = 2 T S 式(11)可以计算得到不模糊速度区间为[-32.5,32.5]m/s。
对于车载雷达,目标和雷达间的最大相对速度可达到200 km/h(即55.6 m/s)以上。上述计算得到的不模糊速度区间已不能满足实际应用需求。
4 改进的2发4收TDM-MIMO阵元排布方案及信号处理流程
4.1 改进的2发4收TDM-MIMO阵元排布方案
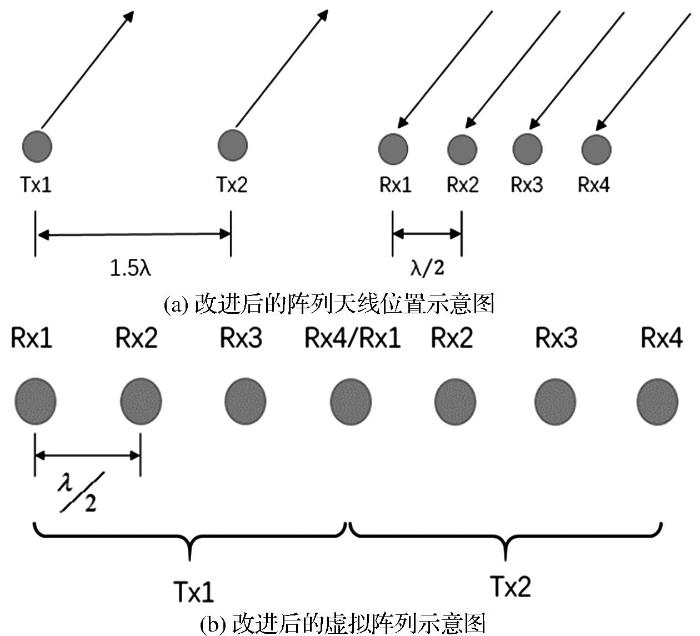
为解决常规2发4收TDM-MIMO雷达最大不模糊速度不满足实际应用的问题,我们提出将两个发射天线间距改为1.5 λ 图4 所示。
图4
图4
改进后的整列天线收发原理图
Fig.4
The improved schematic of uniform linear array antenna
从图中可看出,改变Tx1和Tx2天线的间距后,由Tx1发Rx4收、Tx2发Rx1收的两个虚拟阵元的相位中心重合。将这2个虚拟阵元对应的回波信号交替排列,相邻两次回波的间隔变为发射chirp信号的周期,即T C = T S 表1 参数,由式(11)可以计算得到不模糊速度区间变为[-65, 65]m/s,比常规的2发4收TDM-MIMO雷达最大不模糊速度增加一倍。
由于有2个虚拟阵元的相位中心重合,相比常规的2发4收TDM-MIMO雷达,在进行角度测量时虚拟阵元数由8个变为7个,对应的角度分辨率虽然由14°变为了16°,但对于实际应用而言其影响可以忽略。
4.2 信号处理流程
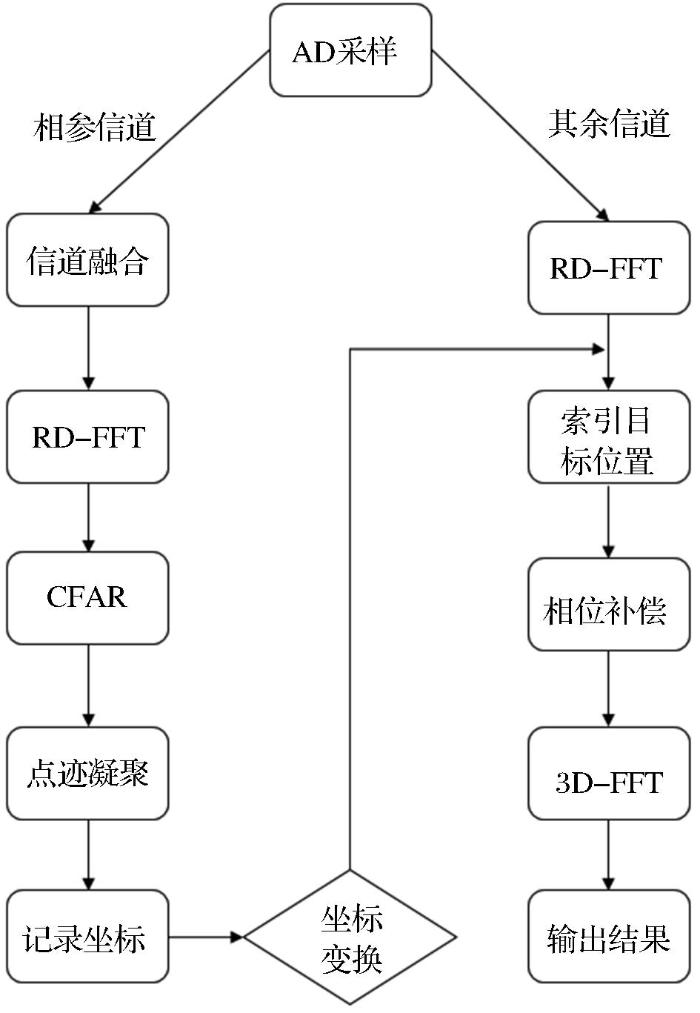
针对改进的TDM-MIMO雷达,提出3D-FFT检测算法的具体信号处理步骤如下:
步骤(2):将相位中心重合的两个通道的回波数据交替排布,即为通道融合。
步骤(3):对通道融合后的采样数据以及剩余通道的采样数据同时做二维FFT,得到距离-多普勒矩阵。
步骤(4):对通道融合后的距离-多普勒矩阵进行CFAR检测,并对检测结果进行聚类。
步骤(5):记录被检测目标在在通道融合后距离-多普勒矩阵中的位置坐标,得到目标对应的距离和速度信息。
步骤(6):在剩余6个信道以及其中一个用于融合的通道中索引目标。
步骤(7):根据Δ φ = π n 2 N d N d = 128 n
步骤(8):依次将每个目标按通道顺序排列并补零做FFT。
步骤(9):对每个目标在角度维计算出的频谱进行峰值检测,得到目标角度信息。
步骤(10):输出目标距离、速度、角度信息,供后续数据处理使用。
图5
图5
信号处理流程图
Fig.5
Signal processing flowchart
5 仿真验证
假设雷达观测场景有4个目标,具体参数如表2 所示。其中目标T2和T3距离相同,速度和角度不同;目标T2和目标T4距离和速度均相同,角度不同;目标T1和T2的距离速度和角度均不相同。表3 给出了2发4收雷达系统的基本参数。
5.1 常规2发4收TDM-MIMO雷达
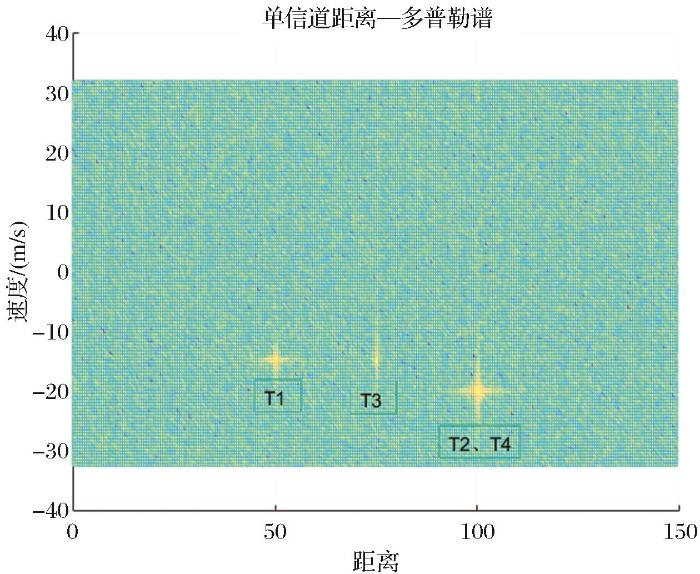
对于常规的2发4收TDM-MIMO雷达,最大不模糊速度为±32.5m/s,对表2 中的4个目标进行仿真,结果如图6 所示。可以看到,对于目标T1已不能够正确测速,会出现速度模糊,与目标T3的速度重合,需要进一步解速度模糊才能得到正确的速度。
图6
图6
未经信道融合仿真结果
Fig.6
Simulation results without channel fusion
5.2 常规三角波雷达
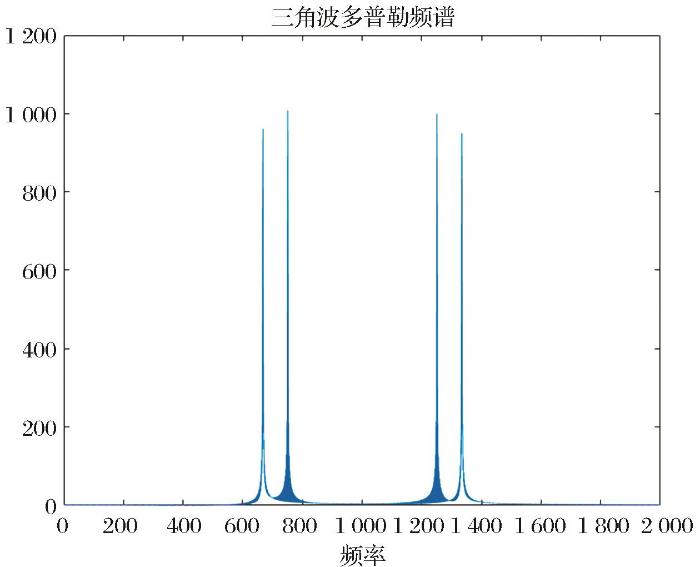
对于距离、速度均不同的目标T2和T3以三角波进行测速仿真。三角波仿真参数参见文献[16 ],具体如表4 所示。
仿真结果如图7 所示。由于三角波存在正负两个调制的频率,T2和T3两个目标会在多普勒频谱上出现4个谱峰。对于以上4个谱峰需进行两两配对才能正确地解出目标速度,而动目标的速度匹配过程是极其复杂且往往不可靠的[16 ] 。而本文TDM-MIMO雷达方案采用3D-FFT算法可以有效地避免多目标速度匹配问题。
图7
图7
三角波雷达目标测量多普勒频谱
Fig.7
Doppler spectrum of triangle wave radar target measurement
5.3 常规单脉冲测角
对于使用单脉冲技术进行测角的雷达,其角度分辨率约为雷达所使用天线的波束宽度。车载雷达的天线受制于孔径大小的约束,通常波束宽度达到50°左右。所以若采用单脉冲技术测角(比幅),则角度分辨率只有50°左右。这对于车载毫米波雷达是不能满足实际应用需求的。
5.4 改进的2发4收TDM-MIMO雷达3D-FFT仿真
对实验提出的阵元排布方案和3D-FFT算法进行仿真。根据表3 的仿真雷达系统参数,可得到本方案能够实现的雷达性能指标如表5 所示。
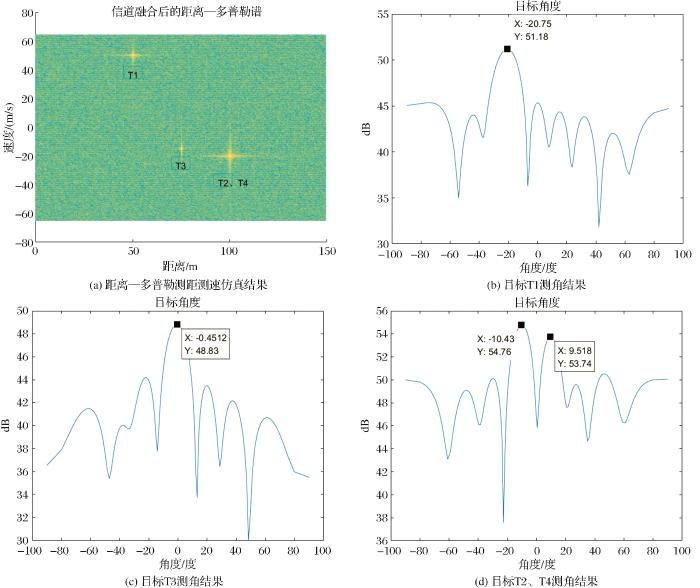
通过3D-FFT算法对表2 中的4个目标进行仿真,结果如图8 所示。可以看出,4个目标的距离速度信息均可直接通过距离—多普勒谱读出。对于距离速度均相同的目标T2和T4可以通过角度检测结果分辨。在实际操作中,依次对距离—多普勒谱做恒虚警检测和对每个目标的3D-FFT结果做峰值检测,便可准确获得所有目标的距离、速度和角度信息。
图8
图8
3D-FFT算法测距测速测角仿真结果
Fig.8
Range velocity and angle measurement simulation results of 3D-FFT algorithm
图8 的结果可由表6 所示,其中测量值与真值的相对误差计算方式为[(测量值-真值)/真值]*100%。结果表明,实验较好地克服了图6 存在的速度模糊。并且不会产生图7 中存在的速度匹配问题,因为能够对所有目标的距离、速度和角度信息直接进行估计。
6 结 语
实验设计了一种以快速chirp信号作为发射波形的TDM-MIMO FMCW车载毫米波雷达3D-FFT目标检测方案及算法实现。通过优化天线阵元排布,该方案可有效解决常规TDM-MIMO由于通道时分复用导致对目标测速时的不模糊速度区间减小的问题。通过Matlab对所提方案和算法进行了仿真验证,结果表明采用改进布局可扩大不模糊速度的测量范围,相比于常规发射三角波形的车载雷达,可以有效避免多目标速度匹配问题;相比于单脉冲测角,可以较大改善角度分辨率。
参考文献
View Option
[1]
Xu Zhigang Zhang Yuqin Wang Yu et al Discussion on the development status and existing problems of China's self-driving car industry
[J].Practical Automobile Technology , 2019 (1 ):13 -21 .
[本文引用: 1]
徐志刚 ,张宇琴 ,王羽 ,等 我国自动驾驶汽车行业发展现状及存在问题的探讨
[J].汽车实用技术 ,2019 (1 ):13 -21 .
[本文引用: 1]
[2]
Wang Shulin Zhang Ran Vehicle Detection based on fusion of millimeter wave Radar and visual information
[J].Science and Technology , 2019 (23 ):7 .
[本文引用: 1]
王淑林 ,张冉 基于毫米波雷达和视觉信息融合的车辆检测
[J].科技风 ,2019 (23 ):7 .
[本文引用: 1]
[3]
Camiade M Domnesque D Ouarch Z et al Fully MMIC-based front end for FMCW automotive Radar at 77 GHz
[C]∥ Microwave Conference , 2000 . 30th European . IEEE , 2000.
[本文引用: 1]
[4]
Winkler V Range doppler detection for automotive FMCW Radars
[C]∥ Radar Conference ,2007 . EuRAD 2007. European . IEEE , 2007.
[本文引用: 1]
[5]
Qin Guodong Chen Boxiao Chen Duofang et al Method for speed ambiguity resolution and comprehensive processing of multiple carrier frequency MIMO Radar
[J]. Journal of Electronics & Information Technology ,2009 ,31 (7 ):1696 -1700 .
[本文引用: 1]
秦国栋 , 陈伯孝 , 陈多芳 ,等 多载频MIMO雷达解速度模糊及综合处理方法
[J]. 电子与信息学报 ,2009 ,31 (7 ):1696 -1700 .
[本文引用: 1]
[6]
Yang Jianyu Ling Taibing He Jun MTD and Range-Velocity Ddcoupling of LFMCW Radar
[J]. Journal of Electronics & Information Technology , 2004 ,26 (2 ):169 -173 .
[本文引用: 1]
杨建宇,凌太兵,贺峻,LFMCW雷达运动目标检测与距离速度去耦合
[J]. 电子与信息学报 ,2004 ,26 (2 ):169 -173 .
[本文引用: 1]
[7]
Kojima A Sakurai N Kishigami J I Motion detection using 3D-FFT spectrum
[C]∥ 1993 IEEE International Conference on Acoustics, Speech and Signal Processing ,1993 :213 -216 .
[本文引用: 1]
[8]
Blair W D Brandt-Pearce M Monopulse DOA estimation of two unresolved rayleigh targets
[J]. IEEE Transactions on Aerospace and Electronic Systems , 2001 , 37 (2 ):452 -469 .
[本文引用: 1]
[9]
Song Jianqiang Liu Yunxue A multi-target pairing method based on variable periodic LFMCW Radar MTD
[J]. Space Electronics , 2019 (4 ):25 -33 .
[本文引用: 1]
宋健强 ,刘云学 一种基于变周期LFMCW雷达MTD多目标配对方法
[J]. 空间电子技术 , 2019 (4 ):25 -33 .
[本文引用: 1]
[10]
Liu Yuli Cai Yongjun Zhang Xiangkun et al Design and implementation of FM continuous wave synthetic aperture Radar system
[J]. Remote Sensing Technology and Application ,2016 ,31 (2 ):255 -259 .
[本文引用: 1]
刘玉立 , 蔡永俊 , 张祥坤 ,等 调频连续波合成孔径雷达系统设计与实现
[J]. 遥感技术与应用 ,2016 ,31 (2 ):255 -259 .
[本文引用: 1]
[11]
Geroleo F G Brandt-Pearce M Detection and estimation of LFMCW Radar signals
[J]. IEEE Transactions on Aerospace & Electronic Systems ,2012 ,48 (1 ):405 -418 .
[本文引用: 1]
[12]
Yang Xiaoqian Liu Zhoujie Feng Aixi Range-speed synchronous jamming technology of LFMCW Radar
[J]. Electronic Information Countermeasures Technology ,2015 ,30 (6 ):22 -28 .
[本文引用: 1]
杨晓倩 , 刘州杰 , 冯艾茜 LFMCW雷达距离-速度同步干扰技术
[J]. 电子信息对抗技术 ,2015 ,30 (6 ):22 -28 .
[本文引用: 1]
[13]
Gao Wenji Qiu Linmao Fei Tao Influence of nonlinearity of LFM signal on received beat signal in LFMCW Radar
[J]. Fire Control Radar Technology ,2012 (4 ):19 -22 .
[本文引用: 1]
高文冀 , 邱林茂 , 费涛 LFMCW雷达中线性调频信号非线性度对接收差拍信号的影响分析
[J]. 火控雷达技术 ,2012 (4 ):19 -22 .
[本文引用: 1]
[14]
Jiang Bing Zhou Teng Tang Yue Design and experiment of a cost-effective TDM MIMO Radar system
[J]. Modern Radar ,2017 (2 ):65 -69 .
[本文引用: 1]
江冰 ,周腾 ,唐玥 一种性价比高的TDM MIMO雷达系统设计和实验
[J].现代雷达 ,2017 (2 ):65 -69 .
[本文引用: 1]
[15]
Charvat G L Goodwin J Tobias M et al Detection Algorithm Implementation and Measured Results for a Real-time, Through-Wall Radar System Using a TDM MIMO Antenna Array
[C]∥ 2012 IEEE Radar Conference , 2012 :0240 -0246 .
[本文引用: 1]
[16]
Li Jian Research on 24 GHz FMCW signal processing technology
[D]. Nanjing :Nanjing University of Science and Technology , 2017 .
[本文引用: 2]
李健 24GHz调频连续波雷达信号处理技术研究
[D]. 南京 :南京理工大学 , 2017 .
[本文引用: 2]
我国自动驾驶汽车行业发展现状及存在问题的探讨
1
2019
... 随着科技的发展与日益增长的交通压力,自动驾驶技术近年来受到了广泛的关注[1 ] .传感器作为自动驾驶技术核心部件,通常采用视觉摄像头、毫米波雷达或激光雷达[2 ] .其中,毫米波雷达因在恶劣天气下稳定的探测效果,具有不可替代的作用[3 ] . ...
我国自动驾驶汽车行业发展现状及存在问题的探讨
1
2019
... 随着科技的发展与日益增长的交通压力,自动驾驶技术近年来受到了广泛的关注[1 ] .传感器作为自动驾驶技术核心部件,通常采用视觉摄像头、毫米波雷达或激光雷达[2 ] .其中,毫米波雷达因在恶劣天气下稳定的探测效果,具有不可替代的作用[3 ] . ...
基于毫米波雷达和视觉信息融合的车辆检测
1
... 随着科技的发展与日益增长的交通压力,自动驾驶技术近年来受到了广泛的关注[1 ] .传感器作为自动驾驶技术核心部件,通常采用视觉摄像头、毫米波雷达或激光雷达[2 ] .其中,毫米波雷达因在恶劣天气下稳定的探测效果,具有不可替代的作用[3 ] . ...
基于毫米波雷达和视觉信息融合的车辆检测
1
... 随着科技的发展与日益增长的交通压力,自动驾驶技术近年来受到了广泛的关注[1 ] .传感器作为自动驾驶技术核心部件,通常采用视觉摄像头、毫米波雷达或激光雷达[2 ] .其中,毫米波雷达因在恶劣天气下稳定的探测效果,具有不可替代的作用[3 ] . ...
Fully MMIC-based front end for FMCW automotive Radar at 77 GHz
1
2000
... 随着科技的发展与日益增长的交通压力,自动驾驶技术近年来受到了广泛的关注[1 ] .传感器作为自动驾驶技术核心部件,通常采用视觉摄像头、毫米波雷达或激光雷达[2 ] .其中,毫米波雷达因在恶劣天气下稳定的探测效果,具有不可替代的作用[3 ] . ...
Range doppler detection for automotive FMCW Radars
1
2007
... 实验主要针对分时复用多输入多输出调频连续波(Time Division Multiplexing-Multiple Input Multiple Output Frequency Modulated Continuous Wave,TDM-MIMO FMCW)车载毫米波雷达信号处理问题开展研究.TDM-MIMO FMCW雷达通常以快速chirp信号作为雷达发射波形.在本实验中,首先对回波进行二维快速傅立叶变换(Fast Fourier Transform,FFT)得到距离—多普勒(Range-Doppler,RD)谱,进而得到目标距离、速度信息[4 ] ;然后,对TDM-MIMO形成的虚拟阵列得到的多通道信号进行FFT,得到目标角度信息.以上通过3个维度的FFT操作获得目标的距离、速度和角度信息,因此称为三维FFT(3D-FFT)检测算法. ...
多载频MIMO雷达解速度模糊及综合处理方法
1
2009
... 但是,常规TDM-MIMO会降低速度维的采样率,导致对目标测速的不模糊速度区间减小,速度测量时会产生速度模糊[5 -6 ] .为此,提出了一种优化MIMO天线阵元排布间距,使得其中两个虚拟阵元相位中心重合,通过将这两个通道的回波信号数据交替排布,增加测速时的不模糊速度区间. ...
多载频MIMO雷达解速度模糊及综合处理方法
1
2009
... 但是,常规TDM-MIMO会降低速度维的采样率,导致对目标测速的不模糊速度区间减小,速度测量时会产生速度模糊[5 -6 ] .为此,提出了一种优化MIMO天线阵元排布间距,使得其中两个虚拟阵元相位中心重合,通过将这两个通道的回波信号数据交替排布,增加测速时的不模糊速度区间. ...
杨建宇,凌太兵,贺峻,LFMCW雷达运动目标检测与距离速度去耦合
1
2004
... 但是,常规TDM-MIMO会降低速度维的采样率,导致对目标测速的不模糊速度区间减小,速度测量时会产生速度模糊[5 -6 ] .为此,提出了一种优化MIMO天线阵元排布间距,使得其中两个虚拟阵元相位中心重合,通过将这两个通道的回波信号数据交替排布,增加测速时的不模糊速度区间. ...
杨建宇,凌太兵,贺峻,LFMCW雷达运动目标检测与距离速度去耦合
1
2004
... 但是,常规TDM-MIMO会降低速度维的采样率,导致对目标测速的不模糊速度区间减小,速度测量时会产生速度模糊[5 -6 ] .为此,提出了一种优化MIMO天线阵元排布间距,使得其中两个虚拟阵元相位中心重合,通过将这两个通道的回波信号数据交替排布,增加测速时的不模糊速度区间. ...
Motion detection using 3D-FFT spectrum
1
1993
... 实验针对TDM-MIMO FMCW雷达提出的这种3D-FFT检测算法[7 ] 可以有效地避免三角波雷达多目标速度匹配问题.并且相较于单脉冲测角,可以极大地改善角度分辨率[8 -9 ] . ...
Monopulse DOA estimation of two unresolved rayleigh targets
1
2001
... 实验针对TDM-MIMO FMCW雷达提出的这种3D-FFT检测算法[7 ] 可以有效地避免三角波雷达多目标速度匹配问题.并且相较于单脉冲测角,可以极大地改善角度分辨率[8 -9 ] . ...
一种基于变周期LFMCW雷达MTD多目标配对方法
1
2019
... 实验针对TDM-MIMO FMCW雷达提出的这种3D-FFT检测算法[7 ] 可以有效地避免三角波雷达多目标速度匹配问题.并且相较于单脉冲测角,可以极大地改善角度分辨率[8 -9 ] . ...
一种基于变周期LFMCW雷达MTD多目标配对方法
1
2019
... 实验针对TDM-MIMO FMCW雷达提出的这种3D-FFT检测算法[7 ] 可以有效地避免三角波雷达多目标速度匹配问题.并且相较于单脉冲测角,可以极大地改善角度分辨率[8 -9 ] . ...
调频连续波合成孔径雷达系统设计与实现
1
2016
... 从测距、测速和测角3个方面具体介绍TDM-MIMO FMCW雷达进行目标检测的原理.车载TDM-MIMO FMCW雷达通常使用快速chirp作为发射信号.快速chirp信号通常指小时宽、大带宽的调频连续波信号(Frequency Modulated Continuous Wave,FMCW)[10 -11 ] . ...
调频连续波合成孔径雷达系统设计与实现
1
2016
... 从测距、测速和测角3个方面具体介绍TDM-MIMO FMCW雷达进行目标检测的原理.车载TDM-MIMO FMCW雷达通常使用快速chirp作为发射信号.快速chirp信号通常指小时宽、大带宽的调频连续波信号(Frequency Modulated Continuous Wave,FMCW)[10 -11 ] . ...
Detection and estimation of LFMCW Radar signals
1
2012
... 从测距、测速和测角3个方面具体介绍TDM-MIMO FMCW雷达进行目标检测的原理.车载TDM-MIMO FMCW雷达通常使用快速chirp作为发射信号.快速chirp信号通常指小时宽、大带宽的调频连续波信号(Frequency Modulated Continuous Wave,FMCW)[10 -11 ] . ...
LFMCW雷达距离-速度同步干扰技术
1
2015
... TDM-MIMO FMCW雷达测距的基本原理是根据去斜[12 ] 后的中频信号频率推算出回波的时延,进而计算出目标的距离信息,如图1 所示. ...
LFMCW雷达距离-速度同步干扰技术
1
2015
... TDM-MIMO FMCW雷达测距的基本原理是根据去斜[12 ] 后的中频信号频率推算出回波的时延,进而计算出目标的距离信息,如图1 所示. ...
LFMCW雷达中线性调频信号非线性度对接收差拍信号的影响分析
1
2012
... 通过与参考信号去斜和低通滤波后,得到差拍信号如下所示[13 ] : ...
LFMCW雷达中线性调频信号非线性度对接收差拍信号的影响分析
1
2012
... 通过与参考信号去斜和低通滤波后,得到差拍信号如下所示[13 ] : ...
一种性价比高的TDM MIMO雷达系统设计和实验
1
2017
... 由2个间距为2 λ λ / 2 λ / 2 [14 ,15 ] ,如图3 所示.由式(18) 可得,在雷达天线波束的法线方向(θ = 0 ∘
一种性价比高的TDM MIMO雷达系统设计和实验
1
2017
... 由2个间距为2 λ λ / 2 λ / 2 [14 ,15 ] ,如图3 所示.由式(18) 可得,在雷达天线波束的法线方向(θ = 0 ∘
Detection Algorithm Implementation and Measured Results for a Real-time, Through-Wall Radar System Using a TDM MIMO Antenna Array
1
2012
... 由2个间距为2 λ λ / 2 λ / 2 [14 ,15 ] ,如图3 所示.由式(18) 可得,在雷达天线波束的法线方向(θ = 0 ∘
24GHz调频连续波雷达信号处理技术研究
2
2017
... 对于距离、速度均不同的目标T2和T3以三角波进行测速仿真.三角波仿真参数参见文献[16 ],具体如表4 所示. ...
... 仿真结果如图7 所示.由于三角波存在正负两个调制的频率,T2和T3两个目标会在多普勒频谱上出现4个谱峰.对于以上4个谱峰需进行两两配对才能正确地解出目标速度,而动目标的速度匹配过程是极其复杂且往往不可靠的[16 ] .而本文TDM-MIMO雷达方案采用3D-FFT算法可以有效地避免多目标速度匹配问题. ...
24GHz调频连续波雷达信号处理技术研究
2
2017
... 对于距离、速度均不同的目标T2和T3以三角波进行测速仿真.三角波仿真参数参见文献[16 ],具体如表4 所示. ...
... 仿真结果如图7 所示.由于三角波存在正负两个调制的频率,T2和T3两个目标会在多普勒频谱上出现4个谱峰.对于以上4个谱峰需进行两两配对才能正确地解出目标速度,而动目标的速度匹配过程是极其复杂且往往不可靠的[16 ] .而本文TDM-MIMO雷达方案采用3D-FFT算法可以有效地避免多目标速度匹配问题. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}