




1 引 言
月亮辐照度是可见近红外波段一种稳定的辐射参考基准,对月观测已成为星载遥感仪器辐射定标和验证的一种新方法[1],国外对月观测开始比较早,美国的EOS系列[2-4]遥感仪器,进行了长期的、系统的对月观测,积累了大量的月球观测数据,是月球定标应用最成功的案例;日本ALOS-3卫星[5],韩国COMS卫星,印度的INSAT-3D卫星[6]都对月球进行过观测,但是月球定标尚未达到定量应用的水平;国内从风云三号C星开始才具备观测月球的能力,风云二号系列不具备有计划的观测月球的能力,但是地球全圆盘业务图像中偶然会出现月球图像[7],高分四号卫星在2018年开始实现了地基轨道高分辨率对月观测【8】,基于该数据国内学者做了相关的定标研究【9-10】,但是更多的对地卫星获取连续可靠的月球观测数据对于支撑我国月球定标技术的发展仍然非常重要。
吉林一号星座具有高精度、应用灵活的观测优势,可以进行月球密集观测和数据获取,目前吉林一号卫星已经获得了大量的月球观测数据。对地卫星获取的月球影像,拍摄过程中获取的影像的位置与姿态是相对于地球的,要换算到相对于月球的位置姿态信息,需要考虑岁差,章动等因素[11],其变换非常复杂,而且虽然卫星对地进行过严格的在轨定标,由于卫星的翻转拍摄,会使各参数偏离地面的定标值,几何纠正精度并不能满足辐射定标要求。
2 研究数据
2.1 吉林一号光谱星月球观测数据
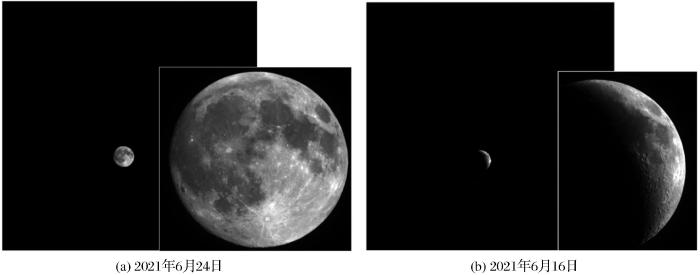
图1

从2019年10月份起,利用相同成像参数同一颗光谱卫星的同一个载荷(光谱02星PMS2)开始对月球进行连续观测,目前已经获取了大量月相位于-90°~90°的月球辐射数据,为月球辐射模型的建立提供了高质量的天基观测数据。吉林一号光谱星包括光谱01星,光谱02星两个卫星,与2019年1月21日在中国酒泉卫星发射中心发射成功,每个卫星搭载两个多光谱成像仪(PMS1,PMS2),每个多光谱成像仪有20个谱段,其中包括7个5 m分辨率谱段,6个10 m分辨率谱段以及7个20 m分辨率谱段,统一的几何信息对于利用这些月球观测数据进行辐射定标具有重要参考价值。
2.2 月球参考数据
通过星月距离可以估算出,吉林一号光谱星获取的月球影像分辨率约3.6 km,考虑分辨率、数据量及纹理信息等因素,目前公开的带有地理信息的月球影像适合作为参考影像的包括嫦娥一号120 m分辨率的正射影像和美国LRO WAC 100 m分辨率的全球影像,考虑数据获取的时效性,本文采用美国LRO WAC 100 m分辨率的全球影像作为几何纠正的参考影像,如图1(b)所示。
3 研究方法
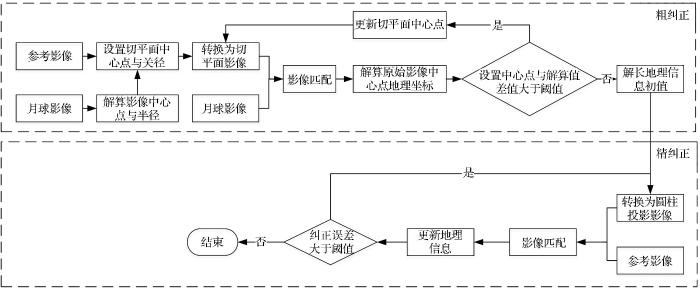
吉林一号光谱星获取月球影像的成像方式为中心投影,满月的月球影像呈圆形,美国LRO WAC 100 m分辨率的全球影像为圆柱投影数据,由于与吉林一号月球观测影像投影方式的不同,两者形状存在非常大的差异,在匹配前必须消除两者的投影差异。如果将中心投影的原始月球影像转换为圆柱投影影像,需要原始月球影像有初始的地理信息,显然没法直接实现;将圆柱投影的参考影像转换为中心投影影像,需要以原始影像的中心地理信息作为坐标原点建立切面直角坐标系,进而建立转换关系,但是坐标原点的位置会直接影响投影变换后的影像与原始月球影像的视角一致性。针对原始月球影像与参考影像投影差异大导致匹配困难的问题,本文提出一种基于迭代匹配实现月球影像几何纠正方法,基本思想是在迭代匹配的过程中减少原始月球影像与参考影像之间的主要形状差异,提高配准精度从而提高几何纠正精度。其具体处理流程如图2所示,首先将圆柱投影的参考影像转换为中心投影影像,在中心投影影像上通过迭代匹配减小坐标转换后的参考影像与原始月球观测影像之间的视角差,通过匹配关系获得原始月球影像的地理信息初值;基于初始地理信息将原始月球影像变换为圆柱投影影像,在圆柱投影影像上通过迭代匹配实现影像的精纠正。其具体处理方法下面分节描述,为了不影响月球观测影像的辐射信息,几何纠正不对影像进行重采样,而是生成一个经度文件,一个纬度文件,文件格式为tif形式,文件大小与影像tif大小一致,对应的经纬度信息与影像一一对应。
图2
3.1 影像粗纠正
美国LRO WAC全球影像,采用的是 CGS_Moon_2000坐标系,将圆柱投影的参考影像转换为中心投影影像,实际上就是以CGS_Moon_2000坐标系某已知点作为坐标原点,X指向东,Y指向北,建立局部空间直角坐标系[16],通过局部空间直角坐标系与经纬度坐标系之间的相互转换实现影像的投影变换。而对地卫星拍摄的月球影像的范围与在地球上看到的基本一致,因为月球自转与地球公转同步锁定,所以在地球上只能看到月球的正面,参考影像的经纬度0点的位置正好是月球正面的中心位置,因此可以在经纬度0点建立局部空间直角坐标系建立转换关系,但是由于月球天平动影响,导致每次观测的原始月球影像中心点的地理信息会有8°以内的差异,因此在经纬度0点的位置建立的局部空间直角坐标系得到的中心投影参考影像与原始月球观测影像仍然会有少量视角差异,需要通过迭代匹配来消除该差异,下面分点介绍。
3.1.1 圆柱投影影像转换为中心投影影像
以某已知点的三维地理信息作为局部空间直角坐标系的坐标原点,在不考虑月球地形的影响的情况下,局部空间直角坐标系上任一点的坐标(X,Y,Z)的解算公式为公式(
其中:moonR为CGS_Moon_2000球体的半径,大小为1 737 400 m;(col,row)为转换后中心投影影像上任意一点的像素坐标;R为转换后中心投影影像的半径。
月球是一个正球体,转换到局部空间直角坐标系的影像是一个正圆形,为了消除比例尺对匹配的影响,转换后的影像半径与中心投影的原始月球影像半径越接近越好,原始月球影像所在圆的半径可以通过数学方法提取,首先检索原始月像所在区域的圆弧侧的任意n个点,如图3,采用最小二乘方法通过
其中:(x,y)为圆弧侧的点坐标;D、E、F为未知量;(cx,cy)为圆心;R为半径。
图3
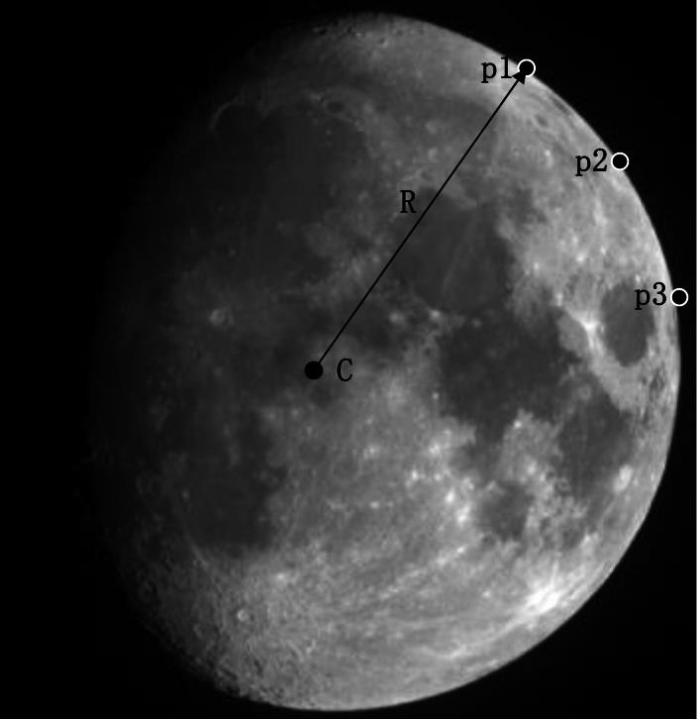
图3
月球影像圆心半径解算示意图
Fig.3
Center radius solution diagram of lunar observation image
3.1.2 迭代匹配
由于SIFT特征对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性,因此采用SIFT特征匹配中心投影的参考影像与原始月球影像[17]。理想情况下,原始月球影像与中心投影的参考影像只有旋转关系,可以采用仿射变换建立两者的变换关系,解算原始月球影像所在圆圆心在中心投影参考影像的位置,以该点的地理信息为坐标原点建立切面直角坐标系得到新的中心投影参考影像,重复匹配与投影变换,直到解算的原始月球影像所在圆的圆心与中心投影参考影像的圆心差值小于一个像素,则迭代结束,一般迭代2次即可实现。如图4(a)~图4(c)依次是原始月球影像,初始中心投影的参考影像,第一次迭代的中心投影参考影像,从图中标记位置可以明显看出,经过迭代中心投影的参考影像的纹理形状与原始月球影像更相近,说明通过迭代缩小了视角差。
图4
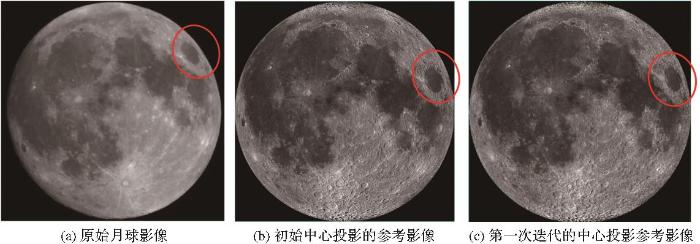
图4
月球影像中心投影参考影像
Fig.4
Original lunar observation image and reference image with central projection
3.2 影像精纠正
坐标转换后的参考影像与月球观测影像无视角差的时候,只需要少量连接点建立放射变换关系便可以获取高精度的几何纠正结果。但是由于月球成像时,是根据星月距离计算月球的分辨率从而使卫星沿俯仰轴相对惯性系匀速转动拍摄目标,解算的分辨率与实际分辨率会存在误差,匀速拍摄目标时卫星也会相对于月球运动,这会导致原始月球观测影像并不是严格的意义上的圆形,导致从原始月球观测影像获取的圆心与半径也会存在误差,中心投影的月球观测影像边缘分辨率又极低,无法提取足够的连接点建立变换关系,而圆柱投影影像具有中心与边缘分辨率一致的特点,为了进一步提高几何纠正精度,可以基于几何粗纠正结果在圆柱投影影像上通过迭代匹配实现影像精纠正。
3.2.1 中心投影影像转换为圆柱投影影像
将中心投影的原始影像转换为圆柱投影数据,就是根据地理信息建立经纬度与单位平面位置之间的关系。为了提高投影变换的效率,将路径追踪[18]的基本思想引入到影像重投影中,以原始影像经纬度确定纠正影像的范围,以影像的最小经度对应的最大纬度作为搜索起点S,以纠正影像第一行自左向右依次作为目标点T,通过判断从搜索的当前位置到目标点连接的线段与原始经纬度格网是否相交,来确定追踪路径的前进方向,进而获得采样点具体位置进行灰度重采样,整景数据采用“S”形的方式进行纠正,第一列自上而下进行纠正,第二列自下而上进行纠正,第三列再自上而下进行纠正,依此类推,直到完成整景影像的纠正.
3.2.2 迭代匹配
由于影像已经进行了粗纠正,原始月球影像与参考影像基本对应,因此可以采用灰度模板匹配,以归一化积相关法作为匹配的相关准则,以较小的搜索范围获取比特征匹配更多更均匀分布的连接点。考虑到月球影像的成像特性,从影像中心区域到边缘区域,变形逐渐增大,并且呈非线性变化,选取二次多项式拟合圆柱投影的原始月球观测影像与参考影像之间的变换关系,然后根据投影变换信息,采用逆距离加权法[19]插值出原始月球观测影像的每个像元的真实地理信息,重复投影变换与匹配的过程,直到二次多项式变换误差小于2个像素则迭代结束。
3.3 半月月球影像处理
半月月球影像纹理信息匮乏,给直接配准带来很大难度,因此地理信息初值获取困难。而月相每29.53 d完成一个周期变化,在一个月相周期内,月球影像缓慢变化,并且相差一个周期的月球影像比较相似,考虑到月球影像的变化特点,认为相邻2 d或者相差29 d,30 d的月球观测数据变化差异不大。因此提出将月球影像相近的几何纠正后的月球影像的地理信息作为未纠正的半月月球影像的初始地理信息,来提高初始地理信息的定位精度。
图5
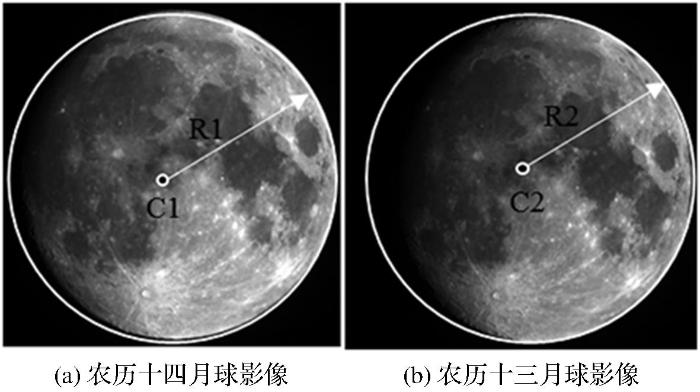
图5
纠正后的月球影像的地理信息赋值给未纠正月球影像
Fig.5
The geographic information of corrected lunar image is assigned to the uncorrected lunar image
4 实验结果分析
4.1 实验数据
图6
4.2 精度评价
从原始月球影像上与参考影像上获取均匀分布的同名检查点对,统计所有检查点的中误差可以对影像几何纠正精度做定量评价。但是原始月球观测影像呈中心投影,地物没有明显的角点,人工刺点误差较大,且影像边缘分辨率极低,匹配算法也很难获得均匀分布的检查点。
图7
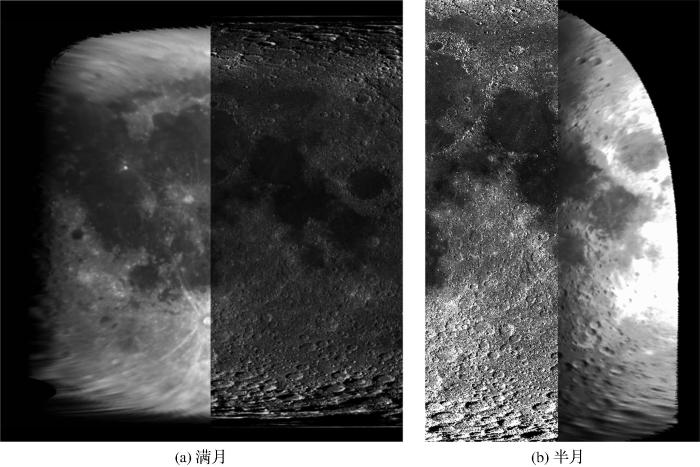
图7
原始月球影像与参考影像叠加显示示意图
Fig.7
The original moon image is superimposed on the reference image
表 1 几何纠正精度
Table 1
| 实验数据 | 检查点 /个 | mdx (pixel) | mdy (pixel) | mdxy (pixel) |
|---|---|---|---|---|
| 数据1 | 48 | 0.93 | 0.25 | 0.96 |
| 数据2 | 15 | 1.32 | 0.29 | 1.36 |
图8
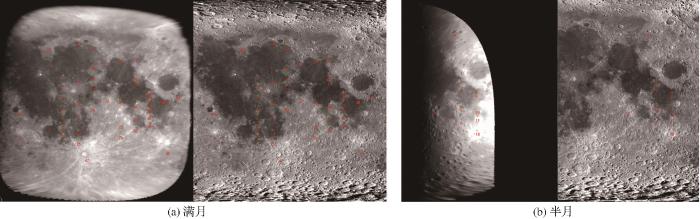
图8
几何纠正影像检查点分布图
Fig.8
Checkpoint distribution map of geometric correction image
5 讨 论
对地卫星获取拍摄月球时,需要对卫星进行翻转,此时对地定标参数与实际情况不符,因此利用位姿信息进行月球观测影像的几何纠正,不仅解算复杂且几何纠正精度不高。因此只能采用配准的方式实现影像的几何纠正,选取美国LRO WAC 100 m分辨率的全球月球影像作为配准的参考影像,但是其投影方式与对对地卫星获取的月球观测影像不同,而且无法直接进行投影变换使影像纹理形状一致,因此本文提出一种基于迭代匹配的月球观测影像几何纠正方法。
首先根据月球自转与地球公转同步锁定关系,在地球上只能看到月球的正面,以经度0点和纬度0点作为坐标原点建立局部空间直角坐标系,以月球影像特性提取月球影像的半径,以此为基准将圆柱投影的月球参考影像转换为中心投影影像,此时由于坐标原点是估计值,投影变换后的月球参考影像与原始影像仍有一定的投影差,通过匹配变换关系迭代切平面坐标系的坐标原点与半径,可以逐步消除投影误差,实现月球影像的粗纠正。
若解算的原始月球影像的半径与圆心位置足够准确,坐标转换后的参考影像与月球观测影像便无视角差,这时候只需要少量连接点建立仿射变换关系便可以获取高精度的几何纠正结果,但是由于月球成像时,沿俯仰轴相对惯性系匀速转动拍摄月球时,卫星也在对应的轨道上运动,这就使原始月球观测影像并不是严格意思上的圆形,而影像边缘因分辨率极低又无法匹配出连接点建立高精度的变换关系。为了进一步提高影像几何纠正精度,通过影像粗纠正结果将中心投影的月球观测影像转换成等分辨率的圆柱投影数据,采用灰度匹配获取足够的同名点建立变换关系,更新影像的地理信息,重复中心投影转圆柱投影与匹配的过程逐步提高匹配精度,最终实现月球观测影像的几何精纠正。
对于半月月球影像,由于纹理信息的匮乏无法在中心投影影像获取足够的同名点建立转换关系,但是通过分析发现月球的成像有周期性特点,因此,可以以月球影像的圆心与半径为基准,将月像变化不大的已经纠正的月球影像的地理信息作为待纠正月球观测影像的地理信息初值,即实现影像的粗纠正,然后按照上述几何精纠正方法实现高精度几何纠正。
本文研究的最终目的和价值是通过对地卫星拍摄月球实现卫星影像的几何纠正,为了不影响原始月球影像的辐射信息,几何纠正单独生成一个经度文件与一个纬度文件,迭代过程中只对经纬度文件进行更新。
为了对本文的算法进行定量评价,由于原始月球观测影像地物没有明显的角点,且影像边缘分辨率极低,人工刺点与匹配算法都很难获取均匀分布的检查点,所以先将原始月球影像转换成圆柱投影数据,获取精度可靠的检查点后反投影到原始月球观测影像上,最后通过检查点的中误差对算法的几何纠正精度进行评价。
6 结 论
利用对地拍摄的月球影像对卫星影像进行辐射定标已成为星载传感器辐射定标的一种新方法,而月球观测的配准需求也是同类数据面临的新挑战,国际尚无公开报道,针对对地卫星拍摄的月球影像几何纠正难度大的问题,提出了一种基于迭代匹配实现月球影像几何纠正的方法。并以吉林一号光谱星为例进行算法验证,实验表明本文的算法不仅实现简单,能够实现无法直接解算地理信息的月球观测影像的几何纠正,而且几何纠正精度较高,因此本文算法有较高的工程应用价值。
参考文献
Monitor the radiance calibration of the remote sensing instrument by using the reflected lunar irradiance
[J].
基于月球反射的遥感器定标跟踪监测
[J].
SeaWiFS measurements of the moon
[C]∥
MODIS reflective solar bands on-orbit lunar calibration
[J].
Improvements of VIIRS and MODIS solar diffuser and lunar calibration
[C]∥
Radiometric calibration plan for the hyperspectral imager suite (HISUI) instruments
[J].
Calibration strategy of INSAT-3D meteorological satellite imager using the moon at IMD, New Delhi
[C]∥
Moon’s remote sensing using FY-2 and moon image registration
[J].
FY-2自旋稳定气象卫星动态月球观测与图像配准
[J].
Research on on-orbit calibration of Gaofen-4 using the moon as a radiometric source
[D].
基于月球辐射源的高分四号在轨定标研究
[D].
Cross calibration of GF-4 visible and near-infrared sensor with CE-3 VNIS sensor based on lunar
[J].
Unveiling the secrets of the midin-frared(3-5 μm) moon
[J].
Study on the cislunar transfer trajectory of thelunar probe
[D].
月球探测器地月空间转移轨道研究
[D].
Research on DEM generation using Three-line array CCD lunar image
[D].
三线阵CCD月面影像DEM生成研究
[D].
The research to modeling and processing of stereo satellite image based on Chang’E-1
[D].
基于嫦娥一号卫星CCD立体影像处理模型与方法的研究
[D].
Advances and applications of lunar photogrammetric mapping using orbital images
[J].
月球轨道器影像摄影测量制图进展及应用
[J].
Research on space - based space target observation based on “Jilin - 1” video satellite
[J].
基于“吉林一号”视频卫星的天基空间目标观测研究
[J].
Distinctive image features from scale-invariant keypoints
[J].
Algorithm of Bo-wtie effect rapid removing for low and medium resolution satellite images
[J].
中低分辨率卫星影像Bowtie效应的快速去除
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}