辐射特征支持下的城市高分影像阴影校正
1
2016
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
辐射特征支持下的城市高分影像阴影校正
1
2016
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
基于统计混合模型的遥感影像阴影检测
1
2011
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
基于统计混合模型的遥感影像阴影检测
1
2011
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
Fine-scale urban heat patterns in New York City measured by ASTER satellite—The role of complex spatial structures
1
2021
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
A robust object-based shadow detection method for cloud-free high resolution satellite images over urban areas and waterodies
0
2018
The effects of roa-dside woo-dy vegetation on the surface temperature of cycle paths
1
2021
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
Adaptive Shadow detection using a blackbody radiator model
1
2011
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
Deeply supervised convolutional neural network for shadow detection based on a novel aerial shadow imagery dataset
1
2020
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
Shadow segmentation and compensation in high resolution satellite images
4
2008
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
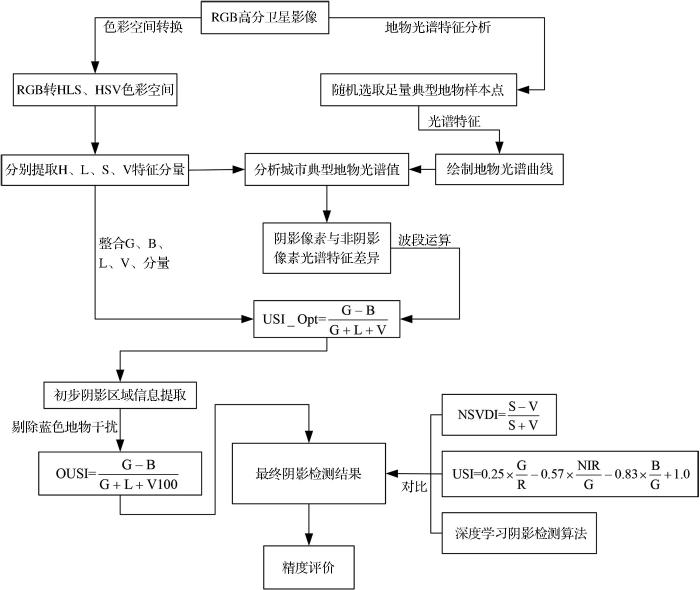
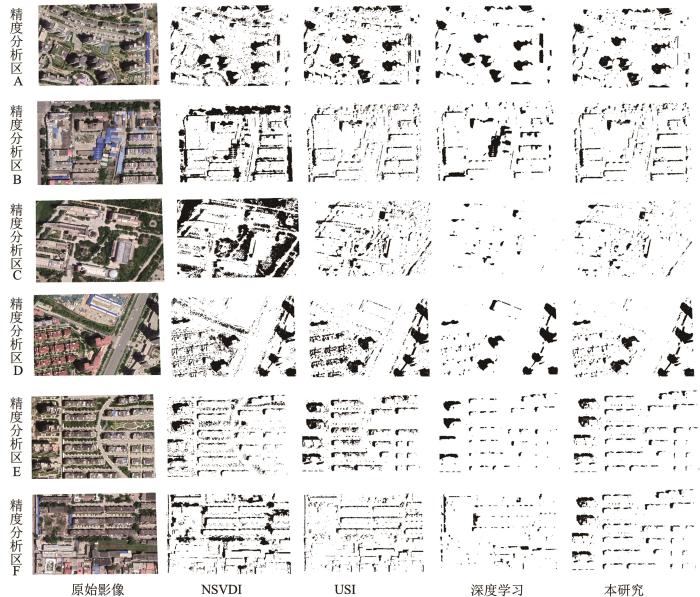
... NSVDI阴影检测方法是由Ma等[8]提出的将RGB图像转换为HSV色彩空间图像,然后根据阴影区域在HSV色彩空间中具有饱和度分量最大和明度分量最小的特性,构造一种归一化饱和度差值指数NSVDI来检测阴影.该方法通过确定一个T=0的阈值对NSVDI图像进行二值化处理,把NSVDI大于0的像素判定为阴影像素,否则为非阴影像素.对色彩空间转换后的影像按式(7)计算NSVDI,然后根据式(8)分割NSVDI图像,阈值处理后得到研究区域的阴影图像.式中,R、G、B、NIR分别为红、绿、蓝和近红外波段. ...
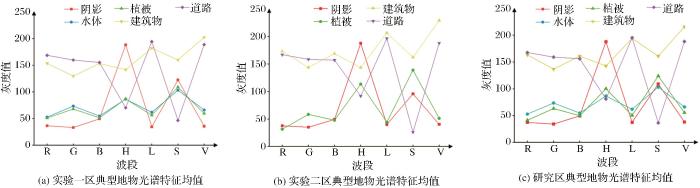
... 城市不同建筑高度、分布形状等造成的阴影差异性非常大,而从可见光波段可以明显目视解译出阴影的存在,即基于目标物典型光谱特征的指数构建理论上是支持的[8];对应着,工作重点就在对阴影特征光谱的提取和对其他非阴影地物的光谱干扰进行剔除[22].因此,突出阴影特征以及弱化或者剔除非阴影特征就成为本研究优化构建出OUSI指数的基本原理和实现思路. ...
A Mixed property-based automatic shadow detection approach for vhr multispectral remote sensing images
0
2018
A novel framework for rapid detection of damaged buildings using pre-event LiDAR data and shadow change information
1
2021
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
Building Extraction from RGB VHR images using shifted shadow algorithm
1
2018
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
高分辨率光学遥感影像变化检测算法在地震灾情调查中的应用
1
2022
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
高分辨率光学遥感影像变化检测算法在地震灾情调查中的应用
1
2022
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
Urban roads network detection from high resolution remote sensing
1
2019
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
DASNet: Dual attentive fully convolutional siamese networks for change detection in high-resolution satellite images
0
2020
联合统计信息与散射模型的GF-5 AHSI可见光影像薄云校正
1
2020
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
联合统计信息与散射模型的GF-5 AHSI可见光影像薄云校正
1
2020
... 城市环境复杂,高分卫星影像中地物特征也格外突出,由建筑物或植被对太阳光线的遮挡而形成了广泛存在于影像中的阴影[1-2].在城市气候方面,阴影区域能够有效缓解城市热岛效应,提升人居环境适宜度[3-5];在城市规划方面,阴影区域信息的缺失会严重损害地物制图精度[6-7],并对目标识别、信息提取、变化监测等实际应用造成诸多障碍[8-10];在城市应急管理方面,阴影作为反映地物特征的信息源能够辅助灾害救援[11-12],完善城市基础设施管理、资源勘查和地图制图[13-15].因此,如何精确、快速地检测阴影区域是利用阴影和消除阴影的关键前提. ...
Simulated recovery of information in shadow areas on IKONOS image by combing ALS data
1
2002
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
Shadow analysis in high-resolution satellite imagery of urban areas
1
2005
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
结合特征分量构建和面向对象方法提取高分辨率卫星影像阴影
1
2014
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
结合特征分量构建和面向对象方法提取高分辨率卫星影像阴影
1
2014
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
基于PCA与HIS模型的高分辨率遥感影像阴影检测研究
1
2013
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
基于PCA与HIS模型的高分辨率遥感影像阴影检测研究
1
2013
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
城市航空影像的阴影检测和阴影消除方法研究
0
2010
城市航空影像的阴影检测和阴影消除方法研究
0
2010
Detection of and compensation for shadows in colored urban aerial images
0
2004
Shadow detection and radiometric restoration in satellite high resolution images
1
2004
... 城市不同建筑高度、分布形状等造成的阴影差异性非常大,而从可见光波段可以明显目视解译出阴影的存在,即基于目标物典型光谱特征的指数构建理论上是支持的[8];对应着,工作重点就在对阴影特征光谱的提取和对其他非阴影地物的光谱干扰进行剔除[22].因此,突出阴影特征以及弱化或者剔除非阴影特征就成为本研究优化构建出OUSI指数的基本原理和实现思路. ...
Accurate shadow detection from high-resolution satellite images
1
2017
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
结合多种特征的高分辨率遥感影像阴影检测
1
2016
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
结合多种特征的高分辨率遥感影像阴影检测
1
2016
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
高分辨率卫星影像中阴影的自动提取与处理
1
2003
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
高分辨率卫星影像中阴影的自动提取与处理
1
2003
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
灰度序列图像中基于纹理特征的移动阴影检测
0
2013
灰度序列图像中基于纹理特征的移动阴影检测
0
2013
高光谱遥感影像纹理特征提取的对比分析
1
2021
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
高光谱遥感影像纹理特征提取的对比分析
1
2021
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
C3通道高分辨率遥感图像阴影检测算法的改进
1
2015
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
C3通道高分辨率遥感图像阴影检测算法的改进
1
2015
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
Shadow detection of the satellite images of earth using ratio image pixels
1
2021
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
基于多特征的遥感影像土地利用/覆盖分类——以腾格里沙漠东南边缘地区为例
1
2006
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
基于多特征的遥感影像土地利用/覆盖分类——以腾格里沙漠东南边缘地区为例
1
2006
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
Shadow detection in remotely sensed images based on self-adaptive feature selection
1
2011
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
Automatic feature learning for robust shadow detection
0
2014
Stacked conditional generative adversarial networks for jointly learning shadow detection and shadow removal
0
2018
Argan: Attentive recurrent generative adversarial network for shadow detection and removal
0
2019
基于BP神经网络的特征融合遥感图像阴影检测
1
2023
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
基于BP神经网络的特征融合遥感图像阴影检测
1
2023
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
Fast shadow detection from a single image using a patched convolutional neural network
1
2018
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
Large-scale training of shadow detectors with noisily-annotated shadow examples
1
2016
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
Shadow detection with conditional generative adversarial networks
1
2017
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
A-fast-rcnn: Hard positive generation via adversary for object detection
0
2017
Unpaired image-to-image tran-slation using cycle-consistent adversarial networks
1
2017
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
Deep fusion feature based object detection method for high resolution optical remote sensing images
1
2019
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
Recurrent Shadow Attention Model (RSAM) for shadow removal in high-resolution urban land-cover mapping
1
2020
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
基于生成对抗网络的图像阴影消除算法
1
2021
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
基于生成对抗网络的图像阴影消除算法
1
2021
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
基于混合注意力模型的阴影检测方法
1
2021
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
基于混合注意力模型的阴影检测方法
1
2021
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
一种基于注意力机制的高效阴影检测算法
1
2022
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
一种基于注意力机制的高效阴影检测算法
1
2022
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
集成特征分量的高分二号影像阴影检测
1
2019
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
集成特征分量的高分二号影像阴影检测
1
2019
... 目前关于阴影检测的研究主要分为基于模型和基于特征两大类.基于物理模型的方法主要利用影像的太阳高度角、传感器参数和地面上物体的几何形状等先验信息建立几何模型来检测阴影[16-17].该方法所需信息不容易获取且要在特定场景下应用,具有较大局限性[18].基于特征的研究通过分析阴影区域的光谱特性构建检测模型,既往研究多着眼于色彩模型[19-23]、主成分变换[24]、纹理指数特征[25-27].Ma等[8]提出一种由色调—饱和度—明度HSV (Hue-Saturation-Value)色彩空间中的阴影特征构造出归一化饱和度差异指数NSVDI (Normalized Saturation-value Difference Index),用于提取建筑阴影;姜建国等[28]提出改进的C3通道更精确地检测出阴影边缘;Musleh等[29]基于HSV色彩空间中色调H与明度V分量的比值图像,通过阈值分割增加差值的像素图像区分出阴影像素.由于阴影指数方法操作简便、数据易得,弥补了基于物理模型的局限性,但遥感影像中存在的同物异谱或异物同谱现象,容易导致错误识别[30].此外,近年来由于人工智能领域的迅速发展,基于面向对象的方法将阴影检测作为一个分类问题来处理,通过影像分割和各种机器学习分类器学习阴影的底层特征来实现阴影对象的提取[31-35],另有利用级联网络[36-37]、生成对抗网络[38-41]等方式.Zhang等[42]提出一种递归式阴影注意力模型RSAM (Recursive Shadow Attention model)来去除阴影;石恒等[43]基于生成对抗网络的思想,提出一种利用阴影残差图像辅助局部修正网络的阴影消除优化模型;谭道强等[44]通过双向金字塔结构,结合混合注意力模型构造出一种新的卷积神经网络CNN (Convolutional Neural Network)阴影检测算法.与传统影像特征方法相比,深度学习的方法具有较强的特征表达能力[45],但缺乏足够的训练数据集[40, 46],运算复杂度高以及消耗内存大等问题. ...
Shadow detection and removal in RGB VHR images for land use unsupervised classification
1
2016
... 以往基于阴影性质的研究通常被认为存在难以确定特征阈值且普适性较差等问题[47],往往无法确保大尺度下阴影提取的准确性[48-49].针对以上问题,本研究基于城市阴影的光谱表现特性,从色彩空间和光谱特征分析着手,构建新的城市阴影优化指数.本研究涉及的原始数据仅为红、绿、蓝三波段,可有效提升基于特征方法的检测精度和模型运算速度,为大规模、高精度的阴影检测提供了切实可行的有力支撑. ...
基于多尺度特征融合的U-Net网络高分影像不透水面提取研究
1
2022
... 以往基于阴影性质的研究通常被认为存在难以确定特征阈值且普适性较差等问题[47],往往无法确保大尺度下阴影提取的准确性[48-49].针对以上问题,本研究基于城市阴影的光谱表现特性,从色彩空间和光谱特征分析着手,构建新的城市阴影优化指数.本研究涉及的原始数据仅为红、绿、蓝三波段,可有效提升基于特征方法的检测精度和模型运算速度,为大规模、高精度的阴影检测提供了切实可行的有力支撑. ...
基于多尺度特征融合的U-Net网络高分影像不透水面提取研究
1
2022
... 以往基于阴影性质的研究通常被认为存在难以确定特征阈值且普适性较差等问题[47],往往无法确保大尺度下阴影提取的准确性[48-49].针对以上问题,本研究基于城市阴影的光谱表现特性,从色彩空间和光谱特征分析着手,构建新的城市阴影优化指数.本研究涉及的原始数据仅为红、绿、蓝三波段,可有效提升基于特征方法的检测精度和模型运算速度,为大规模、高精度的阴影检测提供了切实可行的有力支撑. ...
一种改进的多光谱遥感影像阴影检测方法
2
2020
... 以往基于阴影性质的研究通常被认为存在难以确定特征阈值且普适性较差等问题[47],往往无法确保大尺度下阴影提取的准确性[48-49].针对以上问题,本研究基于城市阴影的光谱表现特性,从色彩空间和光谱特征分析着手,构建新的城市阴影优化指数.本研究涉及的原始数据仅为红、绿、蓝三波段,可有效提升基于特征方法的检测精度和模型运算速度,为大规模、高精度的阴影检测提供了切实可行的有力支撑. ...
... 阴影在图像色度方面表现出较强的色调分量,且在图像亮度方面则表现出较低的亮度分量[49].因此,为了有效利用阴影在图像色度方面的高色调分量和亮度方面的低亮度分量的特点,将RGB色彩空间分别转换为HLS、HSV色彩空间,并提取H、L、S和V分量.HLS色彩空间以色调、饱和度和亮度分量来表述彩色图像信息,而HSV色彩空间由色度、饱和度和明度分量构成,明度是亮度的另一种表达[50].其中,RGB色彩空间转换到HSV色彩空间的变换公式如下: ...
一种改进的多光谱遥感影像阴影检测方法
2
2020
... 以往基于阴影性质的研究通常被认为存在难以确定特征阈值且普适性较差等问题[47],往往无法确保大尺度下阴影提取的准确性[48-49].针对以上问题,本研究基于城市阴影的光谱表现特性,从色彩空间和光谱特征分析着手,构建新的城市阴影优化指数.本研究涉及的原始数据仅为红、绿、蓝三波段,可有效提升基于特征方法的检测精度和模型运算速度,为大规模、高精度的阴影检测提供了切实可行的有力支撑. ...
... 阴影在图像色度方面表现出较强的色调分量,且在图像亮度方面则表现出较低的亮度分量[49].因此,为了有效利用阴影在图像色度方面的高色调分量和亮度方面的低亮度分量的特点,将RGB色彩空间分别转换为HLS、HSV色彩空间,并提取H、L、S和V分量.HLS色彩空间以色调、饱和度和亮度分量来表述彩色图像信息,而HSV色彩空间由色度、饱和度和明度分量构成,明度是亮度的另一种表达[50].其中,RGB色彩空间转换到HSV色彩空间的变换公式如下: ...
高分辨率光学遥感图像阴影检测与补偿技术研究
1
2021
... 阴影在图像色度方面表现出较强的色调分量,且在图像亮度方面则表现出较低的亮度分量[49].因此,为了有效利用阴影在图像色度方面的高色调分量和亮度方面的低亮度分量的特点,将RGB色彩空间分别转换为HLS、HSV色彩空间,并提取H、L、S和V分量.HLS色彩空间以色调、饱和度和亮度分量来表述彩色图像信息,而HSV色彩空间由色度、饱和度和明度分量构成,明度是亮度的另一种表达[50].其中,RGB色彩空间转换到HSV色彩空间的变换公式如下: ...
高分辨率光学遥感图像阴影检测与补偿技术研究
1
2021
... 阴影在图像色度方面表现出较强的色调分量,且在图像亮度方面则表现出较低的亮度分量[49].因此,为了有效利用阴影在图像色度方面的高色调分量和亮度方面的低亮度分量的特点,将RGB色彩空间分别转换为HLS、HSV色彩空间,并提取H、L、S和V分量.HLS色彩空间以色调、饱和度和亮度分量来表述彩色图像信息,而HSV色彩空间由色度、饱和度和明度分量构成,明度是亮度的另一种表达[50].其中,RGB色彩空间转换到HSV色彩空间的变换公式如下: ...
Two-Step Urban Water Index (TSUWI): A new technique for high-resolution mapping of urban surface water
1
2018
... Wu等[51]提出了一种城市阴影指数USI (Urban Shadow Index),用来去除由城市水指数UWI (Urban Water Index)提取结果中与水体混淆的阴影.通过具有NIR/G、B/G和G/R特征的水和阴影像素,将水像素标记为1,阴影像素为-1,波段比率保留两位小数,而常数项保留一位小数,得到最终的城市阴影指数.而本研究所使用的RGB高分卫星影像只包含红绿蓝三波段,地物光谱分析中,阴影在H波段的灰度值远远大于其它波段,因此用H波段代替NIR波段. ...
Building recognition from aerial images combining segmentation and shadow
1
2009
... 深度学习起源于人工神经网络的研究,通过模拟人脑认知进行分析学习,并模仿人脑机制来解释数据的一种机器学习技术.它由多层简单模块组成,从底层输入数据中学习一个低层次特征,通过线性或非线性计算得到高层次的特征[52].近年来深度学习在遥感领域的应用不断扩展,最主要的有地物分类与目标识别[53]. ...
Deep learning and process understanding for data-driven earth system science
1
2019
... 深度学习起源于人工神经网络的研究,通过模拟人脑认知进行分析学习,并模仿人脑机制来解释数据的一种机器学习技术.它由多层简单模块组成,从底层输入数据中学习一个低层次特征,通过线性或非线性计算得到高层次的特征[52].近年来深度学习在遥感领域的应用不断扩展,最主要的有地物分类与目标识别[53]. ...
An unexpectedly large count of trees in the west african sahara and sahel
1
2020
... Brandt等[54]利用亚米级高分辨率卫星图像和深度学习技术,提出一种监测全球非森林树木的方法.其中全卷积神经网络模型作为构造该算法的关键,U-Net模型最早被应用于医学图像细胞分割中[55].该算法通过对U-Net模型稍加修改解决了网络训练中数据不平衡的问题[56],从而实现大面积自动化的树冠检测技术[57].基于该检测算法,本研究结合现代机器学习技术,利用DigitalGlobe卫星提供的高分(0.5 m)的卫星数据,运用此改进的U-Net模型框架实现对阴影特征的自动学习,最终得到研究区域内的阴影检测结果. ...
U-net: Convolutional networks for biomedical image segmentation
1
2015
... Brandt等[54]利用亚米级高分辨率卫星图像和深度学习技术,提出一种监测全球非森林树木的方法.其中全卷积神经网络模型作为构造该算法的关键,U-Net模型最早被应用于医学图像细胞分割中[55].该算法通过对U-Net模型稍加修改解决了网络训练中数据不平衡的问题[56],从而实现大面积自动化的树冠检测技术[57].基于该检测算法,本研究结合现代机器学习技术,利用DigitalGlobe卫星提供的高分(0.5 m)的卫星数据,运用此改进的U-Net模型框架实现对阴影特征的自动学习,最终得到研究区域内的阴影检测结果. ...
Dropout: A simple way to prevent neural networks from overfitting
1
2014
... Brandt等[54]利用亚米级高分辨率卫星图像和深度学习技术,提出一种监测全球非森林树木的方法.其中全卷积神经网络模型作为构造该算法的关键,U-Net模型最早被应用于医学图像细胞分割中[55].该算法通过对U-Net模型稍加修改解决了网络训练中数据不平衡的问题[56],从而实现大面积自动化的树冠检测技术[57].基于该检测算法,本研究结合现代机器学习技术,利用DigitalGlobe卫星提供的高分(0.5 m)的卫星数据,运用此改进的U-Net模型框架实现对阴影特征的自动学习,最终得到研究区域内的阴影检测结果. ...
Accurate segmentation of dental panoramic radiographs with U-Nets
1
2019
... Brandt等[54]利用亚米级高分辨率卫星图像和深度学习技术,提出一种监测全球非森林树木的方法.其中全卷积神经网络模型作为构造该算法的关键,U-Net模型最早被应用于医学图像细胞分割中[55].该算法通过对U-Net模型稍加修改解决了网络训练中数据不平衡的问题[56],从而实现大面积自动化的树冠检测技术[57].基于该检测算法,本研究结合现代机器学习技术,利用DigitalGlobe卫星提供的高分(0.5 m)的卫星数据,运用此改进的U-Net模型框架实现对阴影特征的自动学习,最终得到研究区域内的阴影检测结果. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}