基于三维激光扫描技术的马尾松冠层孔隙度研究
严夏帆 , 1 , 2 , 赵文凯 1 , 2 , 杨舜成 3 , 林灵辰 1 , 2 , 刘健 1 , 2 , 余坤勇 , 1 , 2
1.福建农林大学林学院,福建 福州 350002
2.3S技术与资源优化利用福建省高校重点实验室,福建 福州 350002
3.福建省水土保持试验站,福建 福州 350002
Canopy Porosity of Masson Pine based on Terrestrial 3D Laser Scanning
YAN Xiafan , 1 , 2 , ZHAO Wenkai 1 , 2 , YANG Shuncheng 3 , LIN Lingchen 1 , 2 , LIU Jian 1 , 2 , YU Kunyong , 1 , 2
1.College of Forestry,Fujian Agriculture and Forestry University,Fuzhou 350002,China
2.Fujian Province Key Laboratory of 3S Technology and Optimal Utilization of Resources,Fuzhou 350002,China
3.Soil and Water Conservation Test Station,Fuzhou 350002,China
通讯作者: 余坤勇(1980-),男,福建仙游人,博士生导师,教授,主要从事资源监测及3S技术应用研究。E⁃mail:yuyky@126.com
收稿日期: 2022-01-19
修回日期: 2023-07-05
基金资助:
福建省水利厅科技项目 . MSK202106 国家自然科学基金面上项目 . 32271876 福建省森林资源智慧监测和碳汇计量关键技术研究 . 2022FKJ03 3S技术与资源优化利用福建省高校重点实验室建设项目 . PTJH17014
Received: 2022-01-19
Revised: 2023-07-05
作者简介 About authors
严夏帆(1994-),女,福建仙游人,硕士研究生,主要从事森林资源经营管理研究E⁃mail:982223240@qq.com
, E-mail:982223240@qq.com
摘要
三维激光扫描技术具有扫描快、对树木无损害、高度还原树木原形等优势,为三维样木重构、树木冠层结构研究及森林资源连年监测研究提供精确的数据。以马尾松为对象,利用三维激光扫描仪获取30株单木点云数据,运用体素化、平面投影和凸包算法等,计算单木冠层孔隙度。结合分层理论,通过与树木生长参数(冠幅、冠体积和冠高度)的相关性分析,构建全冠与不同分层方式提取的冠层孔隙度建立多元线性回归模型,以决定系数(R 2 )、均方根误差(RMSE)、相对分析误差(RPD)和总体精度(TA)确定冠层孔隙度提取的最佳体素边长和最佳分层方式。结果表明:冠层孔隙度提取的最佳的分层方式为冠层形态三分层(R 2 为0.74);冠层形态三分层、冠层形态三分层五分层结合、冠层高度三等分层提取的冠层孔隙度与树木生长参数的影响最为稳定;根据冠层形态分层提取的孔隙度适用于冠层形态差异较大,而冠层形态较一致时,采用冠层高度三等分层是较为合适,精度较高。
关键词:
马尾松 冠层孔隙度 体素化 三维激光扫描仪 分层理论
Abstract
The terrestrial 3D laser scanning technology has the advantages of fast scanning, no damage to trees, and high restoration of the original shape of trees, which provides accurate data for 3D sample wood reconstruction, tree canopy structure research, and forest resource monitoring research on a continuous basis. With the Masson pine as the object, the 3D laser scanner was used to obtain point cloud data of 30 single trees, and the voxelization, planar projection and convex packet algorithm were applied to calculate the porosity of single wood canopy. Combined with the theory of stratification, through the correlation analysis with tree growth parameters (crown width, crown volume and crown height), a multiple linear regression model was established for the canopy porosity extracted from the full crown and different stratification methods, and the coefficient of determination (R 2 ), Root Mean Square Error (RMSE), Residual Predictive Deviation (RPD), and Total Accuracy (TA) to determine the optimal voxel side length and optimal stratification for canopy porosity extraction. The results show that the best stratification method for canopy porosity extraction is to divide canopy shape into three layers (R 2 is 0.74); The effects of canopy porosity and tree growth parameters extracted by three-level stratification are the most stable; the porosity extracted according to canopy shape stratification is suitable for large differences in canopy shape, and when the canopy shape is relatively consistent, the canopy height is used. The third-level stratification is more suitable and has higher precision.
Keywords:
Masson pine (Pinus massoniana ) Canopy porosity Voxelization Terrestrial laser scanner layering theory
本文引用格式
严夏帆, 赵文凯, 杨舜成, 林灵辰, 刘健, 余坤勇. 基于三维激光扫描技术的马尾松冠层孔隙度研究 . 遥感技术与应用 [J], 2023, 38(4): 956-966 doi:10.11873/j.issn.1004-0323.2023.4.0956
YAN Xiafan, ZHAO Wenkai, YANG Shuncheng, LIN Lingchen, LIU Jian, YU Kunyong. Canopy Porosity of Masson Pine based on Terrestrial 3D Laser Scanning . Remote Sensing Technology and Application
1 引 言
冠层孔隙度(Canopy Porosity)是树冠层中光线透射能力强弱的表征,对森林中植被的生物和物理过程具有重要影响,如呼吸作用、光合作用和降雨截留作用等[1 -2 ] ,能够直接反映植被冠层结构分布情况,是获取树冠结构及林分生态功能参数的重要基础,常用于反演叶面积指数(Leaf Area Index,LAI)及林下光环境的研究[3 ] 。马尾松(Pinus massoniana Lamb.)作为荒山造林的先锋树种[4 ] ,具有耐贫瘠、生长快、成活率高等特点,被广泛种植于南方水土流失严重的地区—长汀县河田镇,林下植被主要为芒萁,其森林结构单一。冠层孔隙度不仅能反映光对树木生长及林下植被的生长及其质量,也对降雨侵蚀的研究有一定的作用。因此,研究分析马尾松冠层孔隙度的变化情况对南方红壤区水土流失治理成效及区域碳循环过程的研究中具有重要意义。
冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据。利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确。最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等。宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异。高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因。王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片。Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用。郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高。
国内外通过三维激光扫描仪获得的点云数据提取树高和胸径[15 ] 的研究已有很多,但对于点云数据计算冠层孔隙度的相关研究较少。树冠指标的三维化使得树冠层更能贴合冠层枝叶层叠交错的情况,采用对树冠分层提取冠层孔隙度使得该指标更立体化。各个分层的孔隙多寡、分布不同使得各层的光合作用、生长情况也不同。因此,探讨不同形态结构、不同分层处理下的马尾松冠层孔隙度研究,能为林下植被恢复情况及森林冠层降雨截留状况提供基础数据。
本文以三维激光扫描仪获取的马尾松单木冠层点云数据,根据点云分层理论对不同冠层高度进行分层,通过点云体素化、凸包外围轮廓线提取,分别提取单木冠层孔隙度及不同树冠高度的各层孔隙度,探究冠层孔隙度之间的内在关系,对于森林的抚育更新、经营管理和森林系统结构的完整性等方面具有重要的研究意义。
2 数据与研究区
2.1 研究区概况
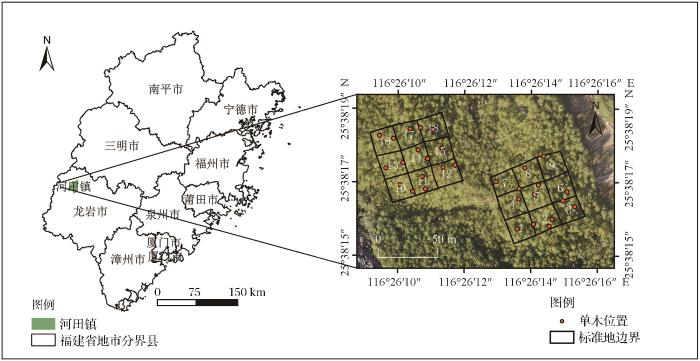
研究区位于福建省龙岩市长汀县中部的河田镇 (116°18'~116°31' E,25°33'~26°18' N),总面积约为315.8 km2 ,河田镇地处亚热带季风气候区,年均温17~19.5 ℃,年降水量约1 700 nm,年无霜期265 d;全镇四周被低山丘陵环绕,中部开阔,土壤类型以红壤为主,是长汀县最大的河谷盆地(图1 )。由于自然和历史因素的影响,土壤养分流失、表土层薄、土层结构破坏造成研究区仍属于水土流失地区。马尾松作为水土治理的先锋树种,具有耐贫瘠、生长快及适应性强的特点,覆盖率可达80%以上。因此研究区以马尾松为研究对象,进行孔隙度的研究测算。
图1
图1
研究区位置图
(审图号:GS(2019)1822)
Fig.1
Location of the Study Area
2.2 数据获取及预处理
2.2.1 标准地数据获取
通过咨询相关专家和实地调研,选取能够代表河田镇马尾松林整体情况的实验区(表1 )。基于马尾松林分空间分布,布设了2个60 m×60 m的大样地,并划分了18个20 m×20 m的马尾松纯林标准地,林分基本情况如表1 。同时在实验区选取30棵马尾松单木作为此次研究的对象。使用无人机自带的高精度RTK对样地角点和单木进行精确定位,定位精度为水平±1 cm,垂直±1.5 cm。
2.2.2 地基雷达数据获取及预处理
研究采用意大利思拓力测绘科技有限公司生产的Stonex X300三维激光扫描仪获取点云数据。Stonex X300是一款采用脉冲式静态三维激光扫描仪,通过无需直接接触的主动发射脉冲激光束扫描目标的表面点云。其最大的水平可视角度范围为360°,垂直可视角度范围为-25°到+65°,在获取三维点云的同时能够拍摄并获取目标场景的真彩色图片信息,增加数据获取的准确性,便于后续数据处理。
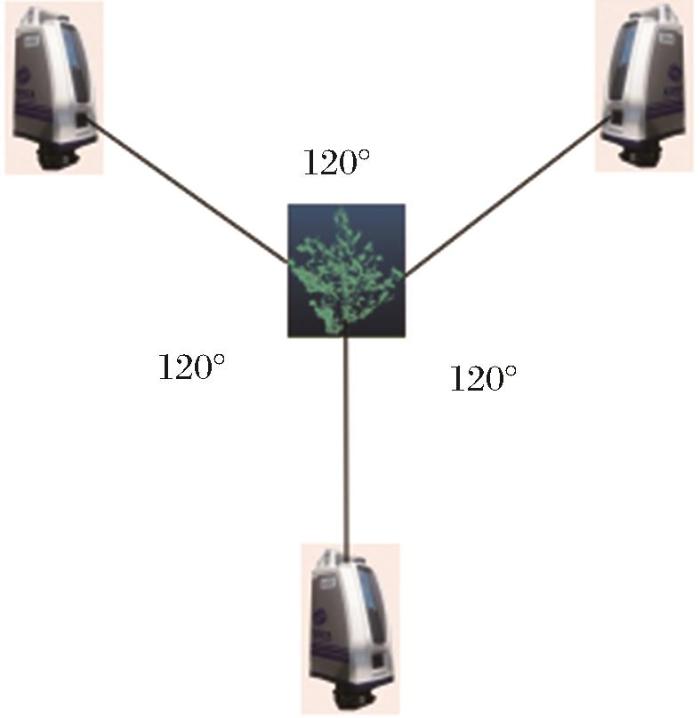
为减少外部环境导致的影响,选择晴朗无风的天气进行外业数据采集。由于林分环境比较复杂,使用传统的三维激光靶球会对内业处理时,将较难找到准确的同名特征点因而增加拼接难度。因此使用1 m×0.5 m的矩形PVC板作为同名标志物固定在单木周围,并确保每个测站点可以扫描到PVC板。采用三站式扫描目标树,测站点以120°的间隔布设,在扫描时将三维激光镜头对准单木,扫描模式设置为快速扫描(图2 )。
图2
图2
地基雷达扫描站点示意图
Fig.2
Scanning site diagram of Terrestrial laser scanner
使用三维激光扫描仪Stonex X300配套的软件Stonex Reconstructor对3个测站点的点云数据进行拼接,由于外部环境的干扰使得所获取的点云中存在冗余点云,对研究结果存在影响,因此需剔除冗余点云。使用CloudCompare软件裁剪工具结合目视解译将易于去除的冗余点剔除,按照邻域统计分析法实现去噪,采用区域增长算法提取叶片点云,得到冠层叶片点云数据。
2.2.3 叶面积指数(LAI)获取及预处理
选择阴天无雨的天气,使用LAI-2200冠层分析仪测量马尾松单木LAI。测量模式设置为1A4B,遮盖帽选择90°,测量时在空旷区域先取一个天空背景值A作为基准,测量单木LAI时,背靠树干同时保持探杆水平状态朝向正前方,分别测量4个方向B值。将测量的结果导入到Fv-2200软件中进行重计算,重计算后的4个方向LAI值取均值作为该单木的LAI实测值。
3 研究方法
3.1 单木冠层孔隙度提取
3.1.1 点云数据体素化
对冠层叶片点云数据进行体素化处理更有利于信息的表达,体素化可以避免多角度测站点所产生的冗余点云数据的重复计算。根据冠层点云数据的笛卡尔坐标系的最小值为原点O,以体素边长划分间隔,对冠层叶片点云进行体素化处理,具体公式为[16 ] :
a = i n t ( X - X m i n L ) × L + X m i n b = i n t ( Y - Y m i n L ) × L + Y m i n c = i n t ( Z - Z m i n L ) × L + Z m i n (1)
其中:(X ,Y ,Z )和(X min ,Y min ,Z min )分别为点云数据的坐标及其最小值;(a、b、c)为点云数据所对应的体素坐标;int为取整符号;L为体素边长。
L = χ ( X m a x - X m i n ) ( Y m a x - Y m i n ) N (2)
其中:X max 为点云横坐标最大值;X min 为点云横坐标最小值;Y max 为点云纵坐标最大值;Y min 为点云纵坐标最小值;N 为点云数量;χ
3.1.2 冠层孔隙度提取
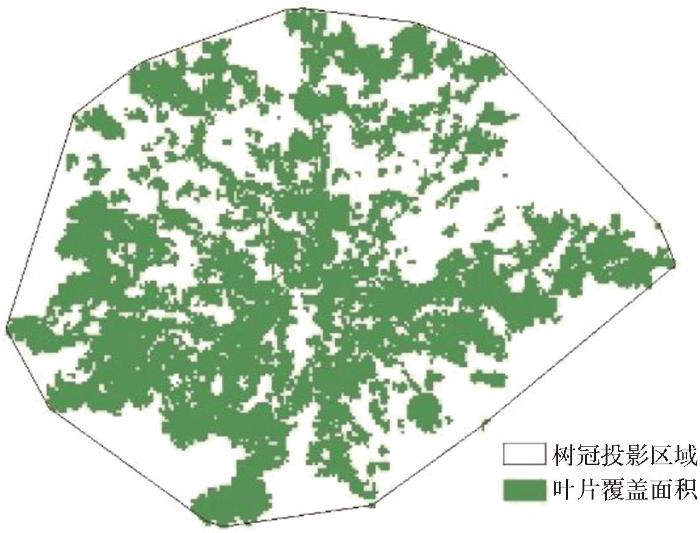
地基雷达数据提供了获取孔隙度的一个无损替代的方法,冠层孔隙度是决定冠层的辐射转移的一个关键的结构参数,能够提高对冠层下部光状态的理解[18 ] 。树冠投影面积的确定关键是树冠边界的提取,一般的做法是简化树冠形状为椭圆形,采用人为测量的冠幅根据椭圆面积计算公式计算树冠投影面积,会受到树冠形状的影响导致所得的树高投影面积不准确。采用凸包算法得到的树冠边界可以较好的计算树冠投影面积。凸包(Convex Hull)是来自计算几何学中的一个最基本的概念,对于散乱的点集中,凸包是指点集最外围的点连接构成的凸多边形[19 ] 。孔隙度提取涉及区域如图3 ,公式[20 ] 为:
P = 1 - N l N s (3)
其中:P 为单木冠层孔隙度;Nl 为投影到平面的体素总面积;Ns 为树冠的投影面积。
图3
图3
冠层孔隙度提取涉及的区域表示
Fig.3
Representation of areas involved in canopy porosity extraction
3.1.3 冠幅、冠高度、冠体积的提取
使用Arc GIS10.8将单木冠层点云以XY坐标展开,投影至平面上,计算投影区域的凸包,测量两个方向的长度,求均值,即可得到冠幅;以XZ坐标展开,测量树冠顶部至树冠底部的长度,即可得到冠层高度;使用MATLAB R2018b根据三维凸包算法,计算凸包所包围空间的体积,即可得到树冠体积。
3.1.4 叶面积指数(LAI)间接反演
Beer-Lambert定律是表示光线通过冠层时的一个消光指数,使用消光系数k 计算。张越[21 ] 的研究表明落叶阔叶林的消光系数k 为0.26,常绿针叶林为0.45,落叶针叶林为0.55,马尾松属于常绿针叶林,因此消光系数为0.45。设定冠层顶部的光照强度为Q 0 ,冠层下的光照强度为Q i ,叶面积指数LAI的计算表达式为:
L A I = - l n Q i Q 0 k (4)
3.1.5 精度验证
不同体素大小对容纳点云数量的能力不同,较大的体素能够弥补由于多站点采样所导致的点云密度不均一的缺陷,但体素过大也会导致过多不属于单木的空间被纳入到体素内;较小的体素能够以更为精细的网格容纳点云以贴合点云数据的真实情况,但过小的体素会导致冠层孔隙度的低估。为确定适用于马尾松单木冠层孔隙度估算的体素边长,采用均方根误差(Root Mean Square Error, RMSE)、总体精度(Total Accuracy, TA)以及相对分析误差(Residual Predictive Deviation, RPD)来进行精度评价。
R M S E = 1 n ∑ i = 1 n ( y i - y ^ i ) 2 T A = 1 n ∑ i = 1 n ( 1 - y i - y ^ i y i ) × 100 % S D = 1 n ∑ i = 1 n ( y i - y ¯ ) 2 R P D = S D R M S E (5)
其中:y i y ^ i y ¯
4 结果与分析
4.1 最适体素边长的确定
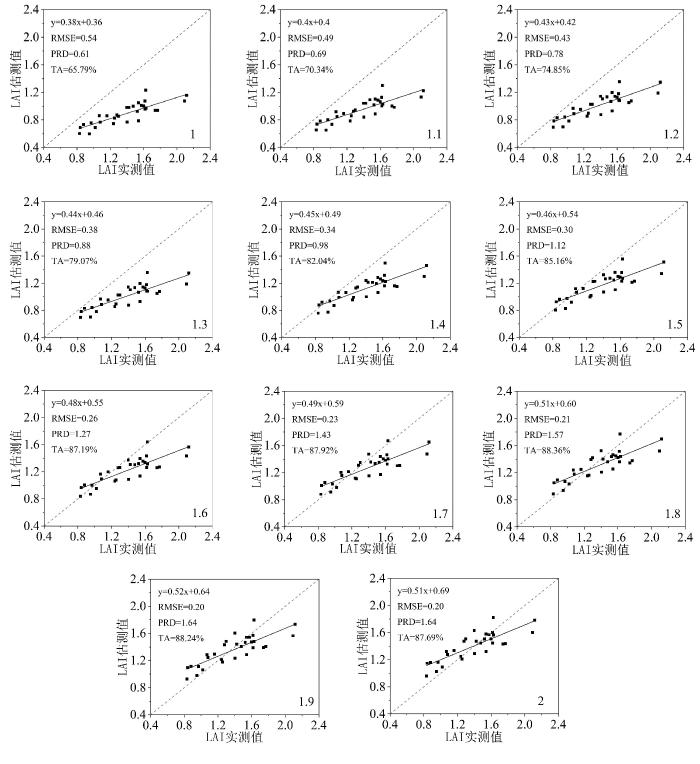
将冠层孔隙度间接反演得到的单木叶面积指数(LAI)估测值与实测的单木叶面积指数(LAI)进行精度验证,从得出的结果中可以看到,在不同尺度因子下,马尾松单木的叶面积指数(LAI)随尺度因子增大而增大,而后开始下降。由图4 可以看出,在尺度因子小于1.7时,RPD都小于1.4,尺度因子到1.9时,RPD最大并保持不变,这是由于随着尺度因子的增大,RMSE逐渐减小并保持不变,随之值趋于稳定。由图可知,在尺度因子为1.8时,LAI实测值与估测值的总体精度最高(88.36%),尺度因子为1时总体精度最低(65.79%),这是由于体素边长较小,不能准确描述叶片分布情况,造成孔隙度高估。
图4
图4
不同尺度因子的叶面积指数(LAI)实测值与估测值比较
Fig.4
Comparison of measured and estimated values of Leaf Area Index (LAI) for different scale factors
综合RMSE、TA与RPD的结果可以得出最佳的尺度因子为1.8,其孔隙度值如表2 。从表2 可以看出30棵马尾松单木的体素边长范围在18 mm~37 mm之间,孔隙度范围在0.45~0.67之间,孔隙度最高为第29棵单木,体素边长为31 mm,最低为第19棵单木,体素边长为25 mm。根据表2 结果表明同一树种,由于树冠形态各异、仪器扫描站点不同,重构的单木点云密度多样以及处理数据的误差影响其体素边长不一致。冠层孔隙度一致时,为进一步研究冠层形态与冠层孔隙度的研究,通过树冠形态与分层理论相结合来分析。
4.2 冠层孔隙度分层对比分析
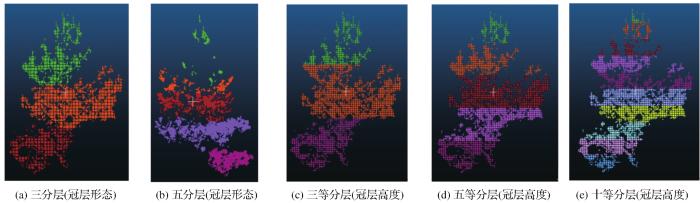
以单木冠层为实验对象,根据冠层形态将树冠点云划分为多个独立的冠层,获取每个冠层的垂直投影面积及冠层孔隙度,划分层次示意图如图5 ,冠层孔隙度值如表3 所示。
图5
图5
冠层点云分层示意图
Fig.5
Canopy point cloud layering diagram
从表中可以看出30株马尾松冠层点云中,14株划分为3层,16株划分为5层,划分为3层的其孔隙度值均在0.5以上,划分为5层的冠层,孔隙度大致趋于平稳,极少数出现第5层孔隙度低的原因是由于马尾松生长过程中,枝叶的更新使得冠层下部不是圆满的情况。
据此进一步探究分层与整体的关系,以冠层高度三等分层、五等分层、十等分层及以冠层形态划分的三层、五层分别进行比较分析。
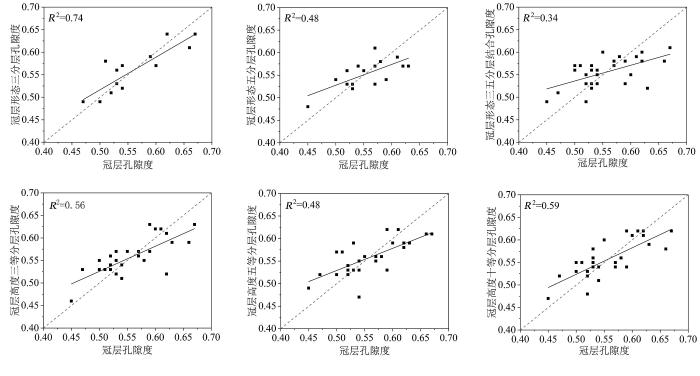
基于以上分层数据,采用多元线性回归分析,各模型的公式见表4 。由图6 可知, 按冠层形态三分层构建的冠层孔隙度多元线性模型估测的R 2 最高(0.74),将按冠层形态三分层五分层结合构建的冠层孔隙度多元线性模型估测的R 2 最低(0.34),按冠层形态五分层与冠层高度五等分层的冠层孔隙度多元线性模型估测的R 2 (0.48)相等。从冠层形态分层来看,其R 2 大小依次为三分层孔隙度(0.74)>五分层孔隙度(0.48)>三分层五分层结合孔隙度(0.34)。从冠层高度分层来看,其R 2 大小依次为十等分层(0.59)>三等分层(0.56)>五等分层(0.48)。
图6
图6
各类别冠层孔隙度多元线性模型比较
Fig.6
Comparison of multivariate linear models of canopy porosity of various types
4.3 冠幅、冠高度、冠体积与冠层孔隙度的关系
马尾松单木冠层的冠幅、冠高度及冠体积与冠层孔隙度相关性分析结果如表5 ,由表可见,冠层孔隙度、按冠层形态分层三五分层结合孔隙度、以及冠层高度三等分层孔隙度与冠体积、冠高度及冠幅均呈显著相关,其中与冠高度均呈极显著相关,冠层高度三等分层孔隙度与冠体积、冠高度和冠幅均呈极显著相关。其中与冠层高度呈极显著相关的有冠层孔隙度、冠层形态三五分层结合孔隙度、冠层高度三等分层孔隙度、冠层高度五等分层孔隙度和冠层高度十等分层孔隙度,研究结果表明树木的冠幅、冠高度、冠体积均会对冠层孔隙度的提取产生影响,冠高度的影响更为显著。从相关性来看,冠层形态三分层孔隙度、冠层形态三五分层结合孔隙度、冠层高度三等分层孔隙度与冠体积、冠高度、冠幅之间的相关性较为稳定。为进一步分析其三者与冠层孔隙度及分层效果的影响情况,使用SPSS软件进行多元线性回归建模分析,结果如表6 。
如表6 可见,冠层孔隙度、冠层形态三分层提取孔隙度、冠层形态五分层提取孔隙度、冠层形态三五分层结合提取孔隙度、冠层高度三等分层提取孔隙度、冠层高度五等分层提取孔隙度、冠层高度十等分层提取孔隙度与冠体积、冠高度、冠幅组成的多元线性回归模型的R 2 依次为0.29、0.37、0.30、0.28、0.28、0.32、0.33,按冠层形态三分层提取的孔隙度R 2 (0.37)最高,表明冠层形态对冠层孔隙度提取是有一定的影响的。
5 讨 论
植被冠层辐射传输的过程中,冠层孔隙度在直接辐射和光子逃逸中的研究中起着关键作用,其中基于冠层孔隙度对森林叶面积指数估测,叶面积指数对了解森林生态系统的结构和功能具有重要意义。目前,植被冠层孔隙度的提取研究,主要采用间接光学方法、被动光学方法和激光扫描仪探测方法来估计森林中的冠层孔隙度[22 ] 。虽然机载激光雷达(ALS)用于提取天顶方向的冠层孔隙度,而TRAC仪器在半波段纬度的大天顶角下提取冠层孔隙度,但地基激光雷达(TLS)和半球照片可以提取整个角度剖面的冠层孔隙度。与半球影像提取孔隙度的技术相比,地基激光雷达(TLS)技术是低估森林中的冠层孔隙度,这种差异的部分原因是由于半球影像方法高估冠层孔隙度。同时,也可能存在地基激光雷达(TLS)技术特有的问题及数据处理的误差等。在测量过程中,专用软件对激光扫描仪信号的处理也会有所不同,因此不同供应商的仪器可能会出现不同的结果[23 ] 。Arumae等[24 ] 利用半球形照片和机载激光雷达(ALS)数据对93个以落叶阔叶为主的半北方林林分的垂直冠层覆盖情况进行了比较,基于机载激光雷达(ALS)的冠层孔隙度提取大于半球照片提取结果。王向玉[25 ] 利用地基雷达点云数据重建单木结构,通过点云密度对单木添加树叶,可获取更为接近真实的三维结构,能够更贴合实际的真值。
本文利用地基雷达点云数据,运用不同尺度因子确定最佳的体素边长,进而提取马尾松单木冠层孔隙度,与单木实测叶面积指数(LAI)进行精度验证。通过冠层孔隙度与冠体积、冠幅和冠高度进行比较分析,结果表明冠高度为极显著相关,分析其原因主要是马尾松为速生针叶树种,树冠斜上伸展,呈宽塔形或伞形,生长过程中形成枝叶较分散,孔隙较大,这与王少腾[26 ] 的研究树冠形状对冠层间隙率的计算,结果一致。冠层高度对冠层孔隙度的影响情况是利用冠层分层理论,分层方式按照冠层形态分层与等距分层两种方式进一步分析冠高度的影响研究中,表明按照树冠形态分为三层时为最好。而全冠提取的孔隙度普遍低于各分层的孔隙度,其主要原因是由于全冠投影时,可见的孔隙是分层中全部都可见的,而随着分层过后,每一个层切面,会有被其他各层遮挡的孔隙逐渐显露出来,因此孔隙占比也越来越多。将冠层分层刨析可将冠层内部被遮掩的孔隙参与计算,使得二维指标更加立体化,也为后期探究不同分层对于冠层中光传播路径及其对于林下植被的恢复成效研究和降雨截留规律研究是有重要的意义的。特别是长汀县由于历史人为影响因素下,造成水土流失严重,虽已不再裸露,但由于马尾松的速生且为针叶树种,其生长过程中冠层会逐渐稀疏,林下植被大都是芒萁,森林结构较为单一,且马尾松受松材线虫病的影响,其病虫害不好管理,亦会造成林下形成二次水土流失情况。本研究可为进一步探讨如何丰富森林结构做前期数据分析基础。
树木的生长和枝叶分布情况及叶片的疏密程度会对树木冠层孔隙度产生直接影响,树木的季相变化,生长变化都会使得冠层孔隙度发生变化,本研究只针对同一年龄的树木且同一季节,因此对于龄组和四季的树木冠层孔隙度的变化是否有一定的规律,不同冠层形态的差异对冠层孔隙度的影响程度是接下来值得继续研究探讨的。冠层孔隙度提取方法多样,可应用不同的冠层孔隙度提取方法进行获取,探讨冠层孔隙度更为精准的提取方法。
6 结 论
(1) 通过不同尺度因子的对比分析研究中,发现当尺度因子为1.8时,可以获得最佳的体素边长,从而提取出最准确的冠层孔隙度,基于最佳体素边长提取的冠层孔隙度获得的叶面积指数(LAI)与实测的叶面积指数(LAI)的精度最高(88.36%)。
(2) 根据树冠形态分层以及按照冠层等间距分层研究中,将未分层提取的冠层孔隙度与各类别分层分别提取的冠层孔隙度组成的多元线性回归模型R 2 为0.74、0.48、0.34、0.56、0.48、0.59,可见模型拟合度较为良好,也可表明按形态分层中,三层是最佳的分层研究方式。
(3) 对所测的样木数据的冠层孔隙度与冠幅、树冠体积和冠层高度相关性分析中可知,冠层孔隙度与冠幅、冠体积呈显著相关,与冠层高度呈极显著相关。按冠层形态三分层、冠层形态三五分层结合、冠层高度三等分层与冠幅、冠体积、冠高度相关性均较稳定,表明冠层形态对冠层孔隙度的提取存在影响。
参考文献
View Option
[1]
ANDRIEU B SINOQUET H Evaluation of structure description requirements for predicting gap fraction of vegetation canopies
[J]. Agricultural and Forest Meteorology ,1993 ,65 (3-4 ):207 -227 .
[本文引用: 1]
[2]
LIU Xuan QU Haiyan WANG Kang et al Study on the canopy porosity of three kinds of roadside trees in Shenyang
[J]. Journal of Northwest Forestry University , 2021 , 36 (2 ): 54 -60 ,219 .
[本文引用: 1]
刘璇 , 屈海燕 , 王康 , 等 沈阳市3种行道树冠层孔隙度研究
[J]. 西北林学院学报 , 2021 , 36 (2 ): 54 -60 ,219 .
[本文引用: 1]
[3]
LI Hui YANG Hua XIE Rong Canopy characteristics of spruce fir forest in Changbai Mountain and its relationship with young seedlings
[J]. Journal of Beijing Forestry University , 2021 , 43 (7 ): 54 -62 .
[本文引用: 1]
李晖 , 杨华 , 谢榕 长白山云冷杉林林隙冠层特征及与幼苗幼树的关系
[J]. 北京林业大学学报 , 2021 , 43 (7 ): 54 -62 .
[本文引用: 1]
[4]
YAO Xiong YU Kunyong DENG Yangbo et al Spatial distribution of soil organic carbon stocks in Masson pine ( Pinus massoniana ) forests in subtropical China
[J]. Catena , 2019 , 178 :189 -198 .
[本文引用: 1]
[5]
GUO Hui Research on the extraction method of forest canopy porosity
[D]. Harbin : Northeast Forestry University , 2016 .
[本文引用: 1]
郭慧 森林冠层孔隙度提取方法研究
[D]. 哈尔滨 :东北林业大学 , 2016 .
[本文引用: 1]
[6]
GUO Libiao LIU Guixiang YUN Xiangjun et al Vegetation Leaf Area Index (LAI) retrieval based on data-based mechanistic model using remote sensing data
[J].Remote Sensing Technology and Application , 2020 , 35 (5 ):1047 -1056 .
[本文引用: 1]
郭利彪 ,刘桂香 ,运向军 ,等 基于数据机理的植被叶面积指数遥感反演研究
[J].遥感技术与应用 , 2020 , 35 (5 ): 1047 -1056 .
[本文引用: 1]
[7]
CHU Hongliang XIAO Qing BAI Junhua et al The retrieval of Leaf Area Index based on remote sensing by unmanned aerial vehicle
[J]. Remote Sensing Technology and Application , 2017 , 32 (1 ): 140 -148 .
[本文引用: 1]
褚洪亮 ,肖青 ,柏军华 ,等 基于无人机遥感的叶面积指数反演
[J].遥感技术与应用 ,2017 ,32 (1 ):140 -148 .
[本文引用: 1]
[8]
SONG Jiayin Research on the inversion method of forest canopy Leaf Area Index using hemispheric images
[D]. Harbin : Northeast Forestry University , 2017 .
[本文引用: 1]
宋佳音 利用半球图像反演森林冠层叶面积指数的方法研究
[D]. 哈尔滨 : 东北林业大学 , 2017 .
[本文引用: 1]
[9]
GAO Jiqing YUN Ting XUE Lianfeng Calculation of true Leaf Area Index based on Fish-Eye camera and ground Lidar
[J]. Journal of Nanjing Normal University(Natural Science Edition) , 2014 , 37 (4 ): 137 -144 .
[本文引用: 1]
高纪青 , 云挺 , 薛联凤 基于鱼目摄像和地面激光雷达的真实叶面积指数计算
[J]. 南京师大学报(自然科学版) , 2014 , 37 (4 ): 137 -144 .
[本文引用: 1]
[10]
WANG Jia ZHANG Fangfei GAO He et al Extraction of single tree canopy structure factors by ground-based lidar
[J]. Journal of Agricultural Machinery , 2018 , 49 (2 ): 199 -206 .
[本文引用: 1]
王佳 , 张芳菲 , 高赫 , 等 地基激光雷达提取单木冠层结构因子研究
[J]. 农业机械学报 , 2018 , 49 (2 ): 199 -206 .
[本文引用: 1]
[11]
INIAN M MILLER John R HU B X et al Retrieving crown Leaf Area Index from an individual tree using ground-based Lidar data
[J]. Canadian Journal of Remote Sensing , 2008 , 34 (3 ):320 -332 .
[本文引用: 1]
[12]
ZHENG Guang Monika MOSKAL L Leaf orientation retrieval from Terrestrial Laser Scanning(TLS) data
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2012 , 50 (10 ): 3970 -3979 .
[本文引用: 1]
[13]
ZHENG G MOSKAL L M Computational-geometry-based retrieval of effective Leaf Area Index using terrestrial laser scanning
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2012 , 50 (10 ): 3958 -3969 .
[14]
ZHENG G MOSKAL L M KIM S-H Retrieval of effective Leaf Area Index in heterogeneous forests with terrestrial laser scanning
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2012 , 51 (2 ): 777 -786 .
[本文引用: 1]
[15]
LUO Yubo HUANG Hongyu TANG Liyu et al Tree height and diameter extraction with 3 d reconstruction in a forest based on TLS
[J]. Remote Sensing Technology and Application , 2019 , 34 (2 ): 243 -252 .
[本文引用: 1]
骆钰波 ,黄洪宇 ,唐丽玉 ,等 基于地面激光雷达点云数据的森林树高、胸径自动提取与三维重建
[J].遥感技术与应用 ,2019 ,34 (2 ):243 -252 .
[本文引用: 1]
[16]
HOSOI F K OMASA K J Voxel-based 3-D modeling of individual trees for estimating leaf area density using high-resolution portable scanning lidar
[J]. IEEE Transactions on Geoscience and Remote Sensing , 2006 , 44 (12 ): 3610 -3618 .
[本文引用: 1]
[17]
PIEGL Les A TILLER W Y Algorithm for finding all k nearest neighbors
[J]. Computer-Aided Design , 2002 , 34 (2 ):167 -172 .
[本文引用: 1]
[18]
KUUSK A PISEK J LANG M et al Estimation of gap fraction and foliage clumping in forest canopies
[J]. Remote Sensing , 2018 , 10 (7 ):1153 .DOI:10.3390/rs10071153
[本文引用: 1]
[19]
YANGQuanyue , CHEN Zhibo SUN Guodong Automatic extraction of tree measurement factors based on point cloud data
[J]. Journal of Agricultural Machinery , 2017 , 48 (8 ): 179 -185 .
[本文引用: 1]
杨全月 , 陈志泊 , 孙国栋 基于点云数据的测树因子自动提取方法
[J]. 农业机械学报 , 2017 , 48 (8 ): 179 -185 .
[本文引用: 1]
[20]
PFEIFFER S A GUEVARA J CHEEIN F A et al Mechatronic terrestrial LiDAR for canopy porosity and crown surface estimation
[J]. Computers and Electronics in Agriculture , 2018 , 146 :104 -113 .
[本文引用: 1]
[21]
ZHANG Yue Simulation of vegetation productivity in the Shitou River Basin of Qinling and its response to climate change based on Biome-BGC model
[D]. Xi'an : Northwestern University , 2019 .
[本文引用: 1]
张越 基于Biome-BGC模型的秦岭石头河流域植被生产力模拟及其对气候变化的响应研究
[D].西安 :西北大学 ,2019 .
[本文引用: 1]
[22]
MENG Yuan Estimation of tree canopy parameters based on ground 3D laser scanning technology
[D]. Harbin : Northeast Forestry University ,2017 .孟园.基于地面三维激光扫描技术的树冠参数的估测研究[D].哈尔滨:东北林业大学 ,2017.
[本文引用: 1]
[23]
JUHA K MATTI M RTTERI P P Effect of flflying altitude, scanning angle and scanning mode on the accuracy of ALS based forest inventory
[J]. Internatinal Journal of Applied Earth Observation and Geoinformation . 2016 , 52 :349 -360 .DOI:10.1016/j.jag.2016.07.005
[本文引用: 1]
[24]
TAURI A LANG M Estimation of canopy cover in dense mixed-species forests using airborne Lidar data
[J]. European Journal of Remote Sensing ,2018 ,51 ,132 -141 .DOI:10.1080/22797254.2017.1411169
[本文引用: 1]
[25]
WANG Xiangyu XIE Donghui WANG Yan et al 3D reconstruction of a single tree from terrestrial laser scanner data
[J]. Remote Sensing Technology and Application , 2015 , 30 (3 ): 455 -460 .
[本文引用: 1]
王向玉 ,谢东辉 ,汪艳 ,等 基于地面激光雷达点云数据的单木三维重建
[J].遥感技术与应用 ,2015 ,30 (3 ):455 -460 .
[本文引用: 1]
[26]
WANG Shaoteng GENG Jun TU Lili et al Study on the influence of semiellipsoidal crown on crown gap ratio and aggregation index
[J]. National Remote Sensing Bulletin ,2021 ,25 (10 ): 2103 -2115
[本文引用: 1]
王少腾 ,耿君 ,涂丽丽 ,等 半椭球形树冠对冠层间隙率与聚集度指数的影响研究
[J].遥感学报 ,2021 ,25 (10 ):2103 -2115 .
[本文引用: 1]
Evaluation of structure description requirements for predicting gap fraction of vegetation canopies
1
1993
... 冠层孔隙度(Canopy Porosity)是树冠层中光线透射能力强弱的表征,对森林中植被的生物和物理过程具有重要影响,如呼吸作用、光合作用和降雨截留作用等[1 -2 ] ,能够直接反映植被冠层结构分布情况,是获取树冠结构及林分生态功能参数的重要基础,常用于反演叶面积指数(Leaf Area Index,LAI)及林下光环境的研究[3 ] .马尾松(Pinus massoniana Lamb.)作为荒山造林的先锋树种[4 ] ,具有耐贫瘠、生长快、成活率高等特点,被广泛种植于南方水土流失严重的地区—长汀县河田镇,林下植被主要为芒萁,其森林结构单一.冠层孔隙度不仅能反映光对树木生长及林下植被的生长及其质量,也对降雨侵蚀的研究有一定的作用.因此,研究分析马尾松冠层孔隙度的变化情况对南方红壤区水土流失治理成效及区域碳循环过程的研究中具有重要意义. ...
沈阳市3种行道树冠层孔隙度研究
1
2021
... 冠层孔隙度(Canopy Porosity)是树冠层中光线透射能力强弱的表征,对森林中植被的生物和物理过程具有重要影响,如呼吸作用、光合作用和降雨截留作用等[1 -2 ] ,能够直接反映植被冠层结构分布情况,是获取树冠结构及林分生态功能参数的重要基础,常用于反演叶面积指数(Leaf Area Index,LAI)及林下光环境的研究[3 ] .马尾松(Pinus massoniana Lamb.)作为荒山造林的先锋树种[4 ] ,具有耐贫瘠、生长快、成活率高等特点,被广泛种植于南方水土流失严重的地区—长汀县河田镇,林下植被主要为芒萁,其森林结构单一.冠层孔隙度不仅能反映光对树木生长及林下植被的生长及其质量,也对降雨侵蚀的研究有一定的作用.因此,研究分析马尾松冠层孔隙度的变化情况对南方红壤区水土流失治理成效及区域碳循环过程的研究中具有重要意义. ...
沈阳市3种行道树冠层孔隙度研究
1
2021
... 冠层孔隙度(Canopy Porosity)是树冠层中光线透射能力强弱的表征,对森林中植被的生物和物理过程具有重要影响,如呼吸作用、光合作用和降雨截留作用等[1 -2 ] ,能够直接反映植被冠层结构分布情况,是获取树冠结构及林分生态功能参数的重要基础,常用于反演叶面积指数(Leaf Area Index,LAI)及林下光环境的研究[3 ] .马尾松(Pinus massoniana Lamb.)作为荒山造林的先锋树种[4 ] ,具有耐贫瘠、生长快、成活率高等特点,被广泛种植于南方水土流失严重的地区—长汀县河田镇,林下植被主要为芒萁,其森林结构单一.冠层孔隙度不仅能反映光对树木生长及林下植被的生长及其质量,也对降雨侵蚀的研究有一定的作用.因此,研究分析马尾松冠层孔隙度的变化情况对南方红壤区水土流失治理成效及区域碳循环过程的研究中具有重要意义. ...
长白山云冷杉林林隙冠层特征及与幼苗幼树的关系
1
2021
... 冠层孔隙度(Canopy Porosity)是树冠层中光线透射能力强弱的表征,对森林中植被的生物和物理过程具有重要影响,如呼吸作用、光合作用和降雨截留作用等[1 -2 ] ,能够直接反映植被冠层结构分布情况,是获取树冠结构及林分生态功能参数的重要基础,常用于反演叶面积指数(Leaf Area Index,LAI)及林下光环境的研究[3 ] .马尾松(Pinus massoniana Lamb.)作为荒山造林的先锋树种[4 ] ,具有耐贫瘠、生长快、成活率高等特点,被广泛种植于南方水土流失严重的地区—长汀县河田镇,林下植被主要为芒萁,其森林结构单一.冠层孔隙度不仅能反映光对树木生长及林下植被的生长及其质量,也对降雨侵蚀的研究有一定的作用.因此,研究分析马尾松冠层孔隙度的变化情况对南方红壤区水土流失治理成效及区域碳循环过程的研究中具有重要意义. ...
长白山云冷杉林林隙冠层特征及与幼苗幼树的关系
1
2021
... 冠层孔隙度(Canopy Porosity)是树冠层中光线透射能力强弱的表征,对森林中植被的生物和物理过程具有重要影响,如呼吸作用、光合作用和降雨截留作用等[1 -2 ] ,能够直接反映植被冠层结构分布情况,是获取树冠结构及林分生态功能参数的重要基础,常用于反演叶面积指数(Leaf Area Index,LAI)及林下光环境的研究[3 ] .马尾松(Pinus massoniana Lamb.)作为荒山造林的先锋树种[4 ] ,具有耐贫瘠、生长快、成活率高等特点,被广泛种植于南方水土流失严重的地区—长汀县河田镇,林下植被主要为芒萁,其森林结构单一.冠层孔隙度不仅能反映光对树木生长及林下植被的生长及其质量,也对降雨侵蚀的研究有一定的作用.因此,研究分析马尾松冠层孔隙度的变化情况对南方红壤区水土流失治理成效及区域碳循环过程的研究中具有重要意义. ...
Spatial distribution of soil organic carbon stocks in Masson pine ( Pinus massoniana ) forests in subtropical China
1
2019
... 冠层孔隙度(Canopy Porosity)是树冠层中光线透射能力强弱的表征,对森林中植被的生物和物理过程具有重要影响,如呼吸作用、光合作用和降雨截留作用等[1 -2 ] ,能够直接反映植被冠层结构分布情况,是获取树冠结构及林分生态功能参数的重要基础,常用于反演叶面积指数(Leaf Area Index,LAI)及林下光环境的研究[3 ] .马尾松(Pinus massoniana Lamb.)作为荒山造林的先锋树种[4 ] ,具有耐贫瘠、生长快、成活率高等特点,被广泛种植于南方水土流失严重的地区—长汀县河田镇,林下植被主要为芒萁,其森林结构单一.冠层孔隙度不仅能反映光对树木生长及林下植被的生长及其质量,也对降雨侵蚀的研究有一定的作用.因此,研究分析马尾松冠层孔隙度的变化情况对南方红壤区水土流失治理成效及区域碳循环过程的研究中具有重要意义. ...
森林冠层孔隙度提取方法研究
1
2016
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
森林冠层孔隙度提取方法研究
1
2016
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
基于数据机理的植被叶面积指数遥感反演研究
1
2020
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
基于数据机理的植被叶面积指数遥感反演研究
1
2020
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
基于无人机遥感的叶面积指数反演
1
2017
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
基于无人机遥感的叶面积指数反演
1
2017
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
利用半球图像反演森林冠层叶面积指数的方法研究
1
2017
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
利用半球图像反演森林冠层叶面积指数的方法研究
1
2017
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
基于鱼目摄像和地面激光雷达的真实叶面积指数计算
1
2014
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
基于鱼目摄像和地面激光雷达的真实叶面积指数计算
1
2014
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
地基激光雷达提取单木冠层结构因子研究
1
2018
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
地基激光雷达提取单木冠层结构因子研究
1
2018
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
Retrieving crown Leaf Area Index from an individual tree using ground-based Lidar data
1
2008
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
Leaf orientation retrieval from Terrestrial Laser Scanning(TLS) data
1
2012
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
Computational-geometry-based retrieval of effective Leaf Area Index using terrestrial laser scanning
0
2012
Retrieval of effective Leaf Area Index in heterogeneous forests with terrestrial laser scanning
1
2012
... 冠层孔隙度的提取方法有很多[5 ] ,主要是由基于辐射原理[6 ] 的光传感器,基于数字图像以及三维点云数据.利用光照度仪器测量冠层上端及下端的光照强度,计算遮光率,根据孔隙度与遮光率的和为1,获得冠层孔隙度,此法简便易行,但在阴天多云的气候下,测定值并不准确.最广泛的采集技术是使用半球图像摄影法,利用鱼眼镜头采集冠层图像,并通过图像处理获取孔隙度,其中图像处理方法会影响孔隙度提取的精度,常用的处理方法有图像分割特征值提取、图像去噪与平滑、图像二值化[7 ] 等.宋佳音[8 ] 运用不同的分割数量和分割算法分析对孔隙度提取的影响,结果表明不同的分割算法会导致孔隙度提取有差异.高纪青等[9 ] 采取鱼目摄影和地基雷达获取得到的半球图像计算孔隙度,发现基于地基雷达点云数据的孔隙度结果普遍较鱼目摄影的高,是由于鱼目照相机存在光照和色差等原因.王佳等[10 ] 基于地基激光雷达获取的数据,通过Lambert方位角等面积投影和球极平面投影提取孔隙度,研究表明点云数据获取较传统测量方法相比是更为精确的,因为三维点云能够准确重构冠层叶片.Moorthy等[11 ] 研究中表明基于三维激光扫描的点云数据提取的冠层孔隙度精度较高,在研究森林形态结构有重要的作用.郑光[12 -14 ] 利用点云分层方法对树冠层的三维结构和叶面积指数进行描述,同时提出了一种点云切片的方式获取有效叶面积指数,研究表明精度较高. ...
基于地面激光雷达点云数据的森林树高、胸径自动提取与三维重建
1
2019
... 国内外通过三维激光扫描仪获得的点云数据提取树高和胸径[15 ] 的研究已有很多,但对于点云数据计算冠层孔隙度的相关研究较少.树冠指标的三维化使得树冠层更能贴合冠层枝叶层叠交错的情况,采用对树冠分层提取冠层孔隙度使得该指标更立体化.各个分层的孔隙多寡、分布不同使得各层的光合作用、生长情况也不同.因此,探讨不同形态结构、不同分层处理下的马尾松冠层孔隙度研究,能为林下植被恢复情况及森林冠层降雨截留状况提供基础数据. ...
基于地面激光雷达点云数据的森林树高、胸径自动提取与三维重建
1
2019
... 国内外通过三维激光扫描仪获得的点云数据提取树高和胸径[15 ] 的研究已有很多,但对于点云数据计算冠层孔隙度的相关研究较少.树冠指标的三维化使得树冠层更能贴合冠层枝叶层叠交错的情况,采用对树冠分层提取冠层孔隙度使得该指标更立体化.各个分层的孔隙多寡、分布不同使得各层的光合作用、生长情况也不同.因此,探讨不同形态结构、不同分层处理下的马尾松冠层孔隙度研究,能为林下植被恢复情况及森林冠层降雨截留状况提供基础数据. ...
Voxel-based 3-D modeling of individual trees for estimating leaf area density using high-resolution portable scanning lidar
1
2006
... 对冠层叶片点云数据进行体素化处理更有利于信息的表达,体素化可以避免多角度测站点所产生的冗余点云数据的重复计算.根据冠层点云数据的笛卡尔坐标系的最小值为原点O,以体素边长划分间隔,对冠层叶片点云进行体素化处理,具体公式为[16 ] : ...
Algorithm for finding all k nearest neighbors
1
2002
... 根据计算获得不同尺度因子的体素边长L[17 ] : ...
Estimation of gap fraction and foliage clumping in forest canopies
1
2018
... 地基雷达数据提供了获取孔隙度的一个无损替代的方法,冠层孔隙度是决定冠层的辐射转移的一个关键的结构参数,能够提高对冠层下部光状态的理解[18 ] .树冠投影面积的确定关键是树冠边界的提取,一般的做法是简化树冠形状为椭圆形,采用人为测量的冠幅根据椭圆面积计算公式计算树冠投影面积,会受到树冠形状的影响导致所得的树高投影面积不准确.采用凸包算法得到的树冠边界可以较好的计算树冠投影面积.凸包(Convex Hull)是来自计算几何学中的一个最基本的概念,对于散乱的点集中,凸包是指点集最外围的点连接构成的凸多边形[19 ] .孔隙度提取涉及区域如图3 ,公式[20 ] 为: ...
基于点云数据的测树因子自动提取方法
1
2017
... 地基雷达数据提供了获取孔隙度的一个无损替代的方法,冠层孔隙度是决定冠层的辐射转移的一个关键的结构参数,能够提高对冠层下部光状态的理解[18 ] .树冠投影面积的确定关键是树冠边界的提取,一般的做法是简化树冠形状为椭圆形,采用人为测量的冠幅根据椭圆面积计算公式计算树冠投影面积,会受到树冠形状的影响导致所得的树高投影面积不准确.采用凸包算法得到的树冠边界可以较好的计算树冠投影面积.凸包(Convex Hull)是来自计算几何学中的一个最基本的概念,对于散乱的点集中,凸包是指点集最外围的点连接构成的凸多边形[19 ] .孔隙度提取涉及区域如图3 ,公式[20 ] 为: ...
基于点云数据的测树因子自动提取方法
1
2017
... 地基雷达数据提供了获取孔隙度的一个无损替代的方法,冠层孔隙度是决定冠层的辐射转移的一个关键的结构参数,能够提高对冠层下部光状态的理解[18 ] .树冠投影面积的确定关键是树冠边界的提取,一般的做法是简化树冠形状为椭圆形,采用人为测量的冠幅根据椭圆面积计算公式计算树冠投影面积,会受到树冠形状的影响导致所得的树高投影面积不准确.采用凸包算法得到的树冠边界可以较好的计算树冠投影面积.凸包(Convex Hull)是来自计算几何学中的一个最基本的概念,对于散乱的点集中,凸包是指点集最外围的点连接构成的凸多边形[19 ] .孔隙度提取涉及区域如图3 ,公式[20 ] 为: ...
Mechatronic terrestrial LiDAR for canopy porosity and crown surface estimation
1
2018
... 地基雷达数据提供了获取孔隙度的一个无损替代的方法,冠层孔隙度是决定冠层的辐射转移的一个关键的结构参数,能够提高对冠层下部光状态的理解[18 ] .树冠投影面积的确定关键是树冠边界的提取,一般的做法是简化树冠形状为椭圆形,采用人为测量的冠幅根据椭圆面积计算公式计算树冠投影面积,会受到树冠形状的影响导致所得的树高投影面积不准确.采用凸包算法得到的树冠边界可以较好的计算树冠投影面积.凸包(Convex Hull)是来自计算几何学中的一个最基本的概念,对于散乱的点集中,凸包是指点集最外围的点连接构成的凸多边形[19 ] .孔隙度提取涉及区域如图3 ,公式[20 ] 为: ...
基于Biome-BGC模型的秦岭石头河流域植被生产力模拟及其对气候变化的响应研究
1
2019
... Beer-Lambert定律是表示光线通过冠层时的一个消光指数,使用消光系数k 计算.张越[21 ] 的研究表明落叶阔叶林的消光系数k 为0.26,常绿针叶林为0.45,落叶针叶林为0.55,马尾松属于常绿针叶林,因此消光系数为0.45.设定冠层顶部的光照强度为Q 0 ,冠层下的光照强度为Q i ,叶面积指数LAI的计算表达式为: ...
基于Biome-BGC模型的秦岭石头河流域植被生产力模拟及其对气候变化的响应研究
1
2019
... Beer-Lambert定律是表示光线通过冠层时的一个消光指数,使用消光系数k 计算.张越[21 ] 的研究表明落叶阔叶林的消光系数k 为0.26,常绿针叶林为0.45,落叶针叶林为0.55,马尾松属于常绿针叶林,因此消光系数为0.45.设定冠层顶部的光照强度为Q 0 ,冠层下的光照强度为Q i ,叶面积指数LAI的计算表达式为: ...
Estimation of tree canopy parameters based on ground 3D laser scanning technology
1
2017
... 植被冠层辐射传输的过程中,冠层孔隙度在直接辐射和光子逃逸中的研究中起着关键作用,其中基于冠层孔隙度对森林叶面积指数估测,叶面积指数对了解森林生态系统的结构和功能具有重要意义.目前,植被冠层孔隙度的提取研究,主要采用间接光学方法、被动光学方法和激光扫描仪探测方法来估计森林中的冠层孔隙度[22 ] .虽然机载激光雷达(ALS)用于提取天顶方向的冠层孔隙度,而TRAC仪器在半波段纬度的大天顶角下提取冠层孔隙度,但地基激光雷达(TLS)和半球照片可以提取整个角度剖面的冠层孔隙度.与半球影像提取孔隙度的技术相比,地基激光雷达(TLS)技术是低估森林中的冠层孔隙度,这种差异的部分原因是由于半球影像方法高估冠层孔隙度.同时,也可能存在地基激光雷达(TLS)技术特有的问题及数据处理的误差等.在测量过程中,专用软件对激光扫描仪信号的处理也会有所不同,因此不同供应商的仪器可能会出现不同的结果[23 ] .Arumae等[24 ] 利用半球形照片和机载激光雷达(ALS)数据对93个以落叶阔叶为主的半北方林林分的垂直冠层覆盖情况进行了比较,基于机载激光雷达(ALS)的冠层孔隙度提取大于半球照片提取结果.王向玉[25 ] 利用地基雷达点云数据重建单木结构,通过点云密度对单木添加树叶,可获取更为接近真实的三维结构,能够更贴合实际的真值. ...
Effect of flflying altitude, scanning angle and scanning mode on the accuracy of ALS based forest inventory
1
2016
... 植被冠层辐射传输的过程中,冠层孔隙度在直接辐射和光子逃逸中的研究中起着关键作用,其中基于冠层孔隙度对森林叶面积指数估测,叶面积指数对了解森林生态系统的结构和功能具有重要意义.目前,植被冠层孔隙度的提取研究,主要采用间接光学方法、被动光学方法和激光扫描仪探测方法来估计森林中的冠层孔隙度[22 ] .虽然机载激光雷达(ALS)用于提取天顶方向的冠层孔隙度,而TRAC仪器在半波段纬度的大天顶角下提取冠层孔隙度,但地基激光雷达(TLS)和半球照片可以提取整个角度剖面的冠层孔隙度.与半球影像提取孔隙度的技术相比,地基激光雷达(TLS)技术是低估森林中的冠层孔隙度,这种差异的部分原因是由于半球影像方法高估冠层孔隙度.同时,也可能存在地基激光雷达(TLS)技术特有的问题及数据处理的误差等.在测量过程中,专用软件对激光扫描仪信号的处理也会有所不同,因此不同供应商的仪器可能会出现不同的结果[23 ] .Arumae等[24 ] 利用半球形照片和机载激光雷达(ALS)数据对93个以落叶阔叶为主的半北方林林分的垂直冠层覆盖情况进行了比较,基于机载激光雷达(ALS)的冠层孔隙度提取大于半球照片提取结果.王向玉[25 ] 利用地基雷达点云数据重建单木结构,通过点云密度对单木添加树叶,可获取更为接近真实的三维结构,能够更贴合实际的真值. ...
Estimation of canopy cover in dense mixed-species forests using airborne Lidar data
1
2018
... 植被冠层辐射传输的过程中,冠层孔隙度在直接辐射和光子逃逸中的研究中起着关键作用,其中基于冠层孔隙度对森林叶面积指数估测,叶面积指数对了解森林生态系统的结构和功能具有重要意义.目前,植被冠层孔隙度的提取研究,主要采用间接光学方法、被动光学方法和激光扫描仪探测方法来估计森林中的冠层孔隙度[22 ] .虽然机载激光雷达(ALS)用于提取天顶方向的冠层孔隙度,而TRAC仪器在半波段纬度的大天顶角下提取冠层孔隙度,但地基激光雷达(TLS)和半球照片可以提取整个角度剖面的冠层孔隙度.与半球影像提取孔隙度的技术相比,地基激光雷达(TLS)技术是低估森林中的冠层孔隙度,这种差异的部分原因是由于半球影像方法高估冠层孔隙度.同时,也可能存在地基激光雷达(TLS)技术特有的问题及数据处理的误差等.在测量过程中,专用软件对激光扫描仪信号的处理也会有所不同,因此不同供应商的仪器可能会出现不同的结果[23 ] .Arumae等[24 ] 利用半球形照片和机载激光雷达(ALS)数据对93个以落叶阔叶为主的半北方林林分的垂直冠层覆盖情况进行了比较,基于机载激光雷达(ALS)的冠层孔隙度提取大于半球照片提取结果.王向玉[25 ] 利用地基雷达点云数据重建单木结构,通过点云密度对单木添加树叶,可获取更为接近真实的三维结构,能够更贴合实际的真值. ...
基于地面激光雷达点云数据的单木三维重建
1
2015
... 植被冠层辐射传输的过程中,冠层孔隙度在直接辐射和光子逃逸中的研究中起着关键作用,其中基于冠层孔隙度对森林叶面积指数估测,叶面积指数对了解森林生态系统的结构和功能具有重要意义.目前,植被冠层孔隙度的提取研究,主要采用间接光学方法、被动光学方法和激光扫描仪探测方法来估计森林中的冠层孔隙度[22 ] .虽然机载激光雷达(ALS)用于提取天顶方向的冠层孔隙度,而TRAC仪器在半波段纬度的大天顶角下提取冠层孔隙度,但地基激光雷达(TLS)和半球照片可以提取整个角度剖面的冠层孔隙度.与半球影像提取孔隙度的技术相比,地基激光雷达(TLS)技术是低估森林中的冠层孔隙度,这种差异的部分原因是由于半球影像方法高估冠层孔隙度.同时,也可能存在地基激光雷达(TLS)技术特有的问题及数据处理的误差等.在测量过程中,专用软件对激光扫描仪信号的处理也会有所不同,因此不同供应商的仪器可能会出现不同的结果[23 ] .Arumae等[24 ] 利用半球形照片和机载激光雷达(ALS)数据对93个以落叶阔叶为主的半北方林林分的垂直冠层覆盖情况进行了比较,基于机载激光雷达(ALS)的冠层孔隙度提取大于半球照片提取结果.王向玉[25 ] 利用地基雷达点云数据重建单木结构,通过点云密度对单木添加树叶,可获取更为接近真实的三维结构,能够更贴合实际的真值. ...
基于地面激光雷达点云数据的单木三维重建
1
2015
... 植被冠层辐射传输的过程中,冠层孔隙度在直接辐射和光子逃逸中的研究中起着关键作用,其中基于冠层孔隙度对森林叶面积指数估测,叶面积指数对了解森林生态系统的结构和功能具有重要意义.目前,植被冠层孔隙度的提取研究,主要采用间接光学方法、被动光学方法和激光扫描仪探测方法来估计森林中的冠层孔隙度[22 ] .虽然机载激光雷达(ALS)用于提取天顶方向的冠层孔隙度,而TRAC仪器在半波段纬度的大天顶角下提取冠层孔隙度,但地基激光雷达(TLS)和半球照片可以提取整个角度剖面的冠层孔隙度.与半球影像提取孔隙度的技术相比,地基激光雷达(TLS)技术是低估森林中的冠层孔隙度,这种差异的部分原因是由于半球影像方法高估冠层孔隙度.同时,也可能存在地基激光雷达(TLS)技术特有的问题及数据处理的误差等.在测量过程中,专用软件对激光扫描仪信号的处理也会有所不同,因此不同供应商的仪器可能会出现不同的结果[23 ] .Arumae等[24 ] 利用半球形照片和机载激光雷达(ALS)数据对93个以落叶阔叶为主的半北方林林分的垂直冠层覆盖情况进行了比较,基于机载激光雷达(ALS)的冠层孔隙度提取大于半球照片提取结果.王向玉[25 ] 利用地基雷达点云数据重建单木结构,通过点云密度对单木添加树叶,可获取更为接近真实的三维结构,能够更贴合实际的真值. ...
半椭球形树冠对冠层间隙率与聚集度指数的影响研究
1
2021
... 本文利用地基雷达点云数据,运用不同尺度因子确定最佳的体素边长,进而提取马尾松单木冠层孔隙度,与单木实测叶面积指数(LAI)进行精度验证.通过冠层孔隙度与冠体积、冠幅和冠高度进行比较分析,结果表明冠高度为极显著相关,分析其原因主要是马尾松为速生针叶树种,树冠斜上伸展,呈宽塔形或伞形,生长过程中形成枝叶较分散,孔隙较大,这与王少腾[26 ] 的研究树冠形状对冠层间隙率的计算,结果一致.冠层高度对冠层孔隙度的影响情况是利用冠层分层理论,分层方式按照冠层形态分层与等距分层两种方式进一步分析冠高度的影响研究中,表明按照树冠形态分为三层时为最好.而全冠提取的孔隙度普遍低于各分层的孔隙度,其主要原因是由于全冠投影时,可见的孔隙是分层中全部都可见的,而随着分层过后,每一个层切面,会有被其他各层遮挡的孔隙逐渐显露出来,因此孔隙占比也越来越多.将冠层分层刨析可将冠层内部被遮掩的孔隙参与计算,使得二维指标更加立体化,也为后期探究不同分层对于冠层中光传播路径及其对于林下植被的恢复成效研究和降雨截留规律研究是有重要的意义的.特别是长汀县由于历史人为影响因素下,造成水土流失严重,虽已不再裸露,但由于马尾松的速生且为针叶树种,其生长过程中冠层会逐渐稀疏,林下植被大都是芒萁,森林结构较为单一,且马尾松受松材线虫病的影响,其病虫害不好管理,亦会造成林下形成二次水土流失情况.本研究可为进一步探讨如何丰富森林结构做前期数据分析基础. ...
半椭球形树冠对冠层间隙率与聚集度指数的影响研究
1
2021
... 本文利用地基雷达点云数据,运用不同尺度因子确定最佳的体素边长,进而提取马尾松单木冠层孔隙度,与单木实测叶面积指数(LAI)进行精度验证.通过冠层孔隙度与冠体积、冠幅和冠高度进行比较分析,结果表明冠高度为极显著相关,分析其原因主要是马尾松为速生针叶树种,树冠斜上伸展,呈宽塔形或伞形,生长过程中形成枝叶较分散,孔隙较大,这与王少腾[26 ] 的研究树冠形状对冠层间隙率的计算,结果一致.冠层高度对冠层孔隙度的影响情况是利用冠层分层理论,分层方式按照冠层形态分层与等距分层两种方式进一步分析冠高度的影响研究中,表明按照树冠形态分为三层时为最好.而全冠提取的孔隙度普遍低于各分层的孔隙度,其主要原因是由于全冠投影时,可见的孔隙是分层中全部都可见的,而随着分层过后,每一个层切面,会有被其他各层遮挡的孔隙逐渐显露出来,因此孔隙占比也越来越多.将冠层分层刨析可将冠层内部被遮掩的孔隙参与计算,使得二维指标更加立体化,也为后期探究不同分层对于冠层中光传播路径及其对于林下植被的恢复成效研究和降雨截留规律研究是有重要的意义的.特别是长汀县由于历史人为影响因素下,造成水土流失严重,虽已不再裸露,但由于马尾松的速生且为针叶树种,其生长过程中冠层会逐渐稀疏,林下植被大都是芒萁,森林结构较为单一,且马尾松受松材线虫病的影响,其病虫害不好管理,亦会造成林下形成二次水土流失情况.本研究可为进一步探讨如何丰富森林结构做前期数据分析基础. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}